如何实现机械臂的视觉抓取
-
关于机械臂的视觉抓取
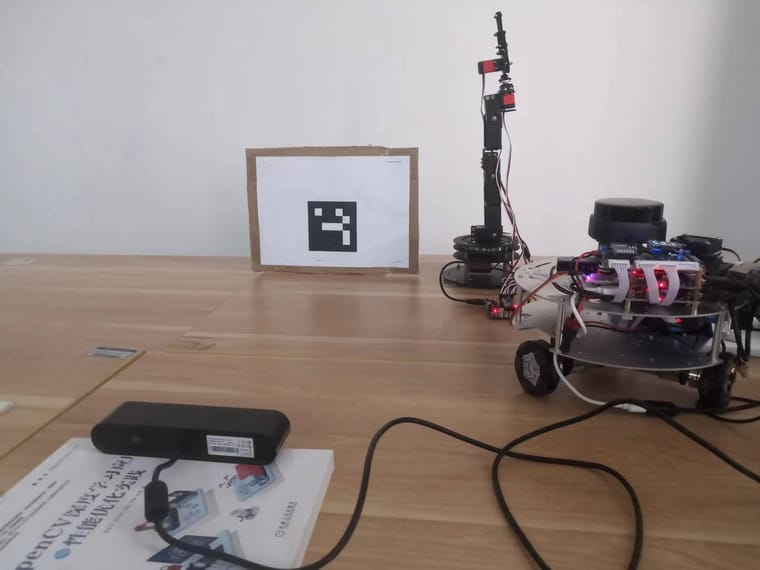
1.我的配置
(1)6个舵机的机械臂
(2)astra s深度相机
(3)stm32板
2.视觉抓取的流程
(1)相机的内参标定(已完成)
(2)手眼标定获取(眼在手外)机械臂底座和相机的tf变化关系(已完成)
(3)物体识别 获取相机坐标系下目标物体的tf变换(已完成)
(4)抓取该物体第四步我不知道该怎么去入手,是不是知道目标物体和机械臂基座的变化关系后就可以实现抓取了,还是要继续知道物体的长宽高,希望得到一个清晰的思路,谢谢了!
-
@小元不圆 看你的夹爪,如果夹爪比较大,可以只用一个点,去抓取,能抓住就行,如果不行,想要根据物体的长宽高控制抓取的位置和角度,这个比较难了,涉及到抓取姿态估计,点云等。
-
@小鱼 那如果是第一种情况,是可以直接moveit运动规划然后夹爪开到最大进行抓取吗
-
@小元不圆 可以的
-
@小元不圆 如果爪子够开开合也足够,俯抓应该可以实现简单抓取,如果一侧长度大于夹爪,就涉及末端姿态
-
@吴凯荣 好嘞感谢!
-
@小鱼 好滴!谢谢了
-
-
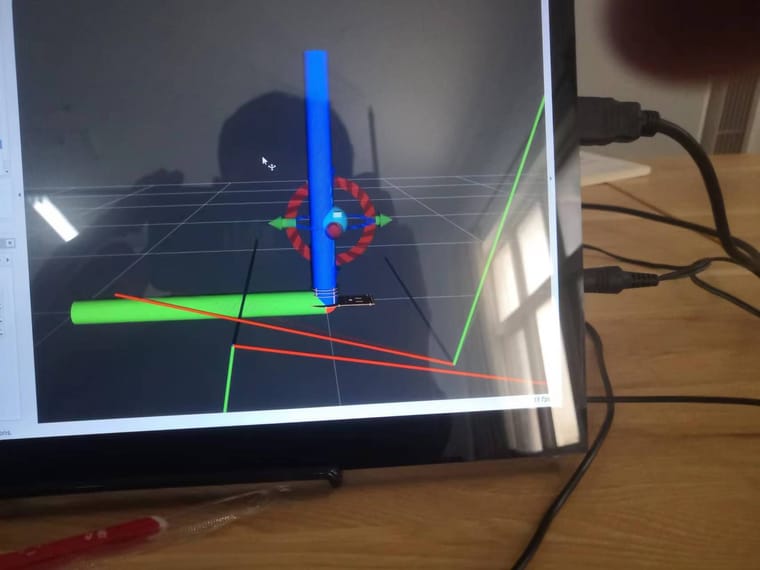
@小元不圆 可以帮我检查一下我的坐标系,是不是对的吗,感觉最后得到的坐标系变换结果不对,最粗的那个坐标系是机械臂基座的,坐标的细线坐标系是相机的,右边的细线坐标系是物体的。
-
@小元不圆 ok我解决了
-
小 小元不圆 将这个主题标记为已解决,在