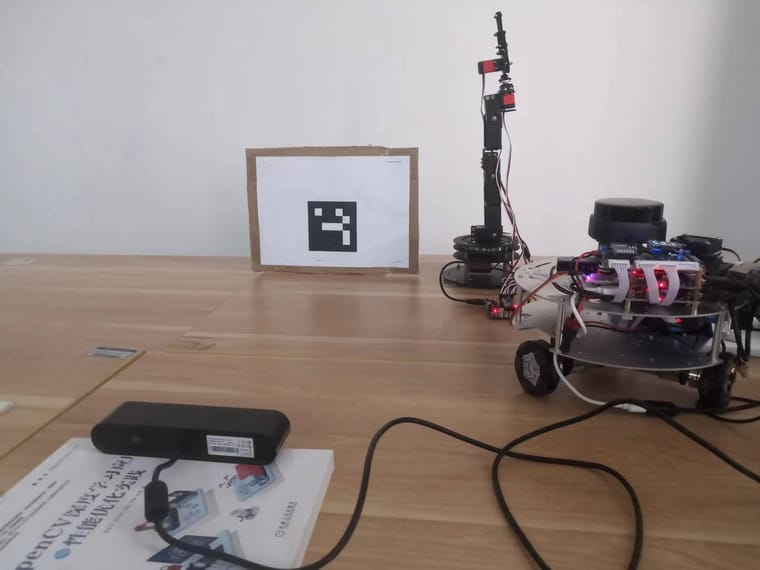
我使用的astra_camera包启动的astra s相机,rviz中最坐标的为rgb_optical_frame坐标系,中间为rgb_optical_frame,最右边为camera_link坐标系, 按照客服的解答camera_link对应相机的中点,那么真实的情况不应该是camera_link在最左边吗,求解

重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
小元不圆 发布的最新帖子
-
在ros中使用astra s相机坐标系和真实的坐标系不一致发布在 综合问题
-
RE: 机械臂如何在运动规划完成后,对物体进行抓取发布在 综合问题
@吴凯荣 我刚刚尝试了一下,如果给夹爪一个固定的角度,xyz由moveit来求解,运动规划的时候经常求不出来解,很难受。似乎不可行
-
RE: 机械臂如何在运动规划完成后,对物体进行抓取发布在 综合问题
@吴凯荣 那请问一下,我目前的是不是可以给定机械臂的末端一个固定的oritation值作为抓取的姿态,然后transformlation值 由目标物体的位置来决定。
-
机械臂如何在运动规划完成后,对物体进行抓取发布在 综合问题
我想请问一下,使用moveit运动学插件后,只能使机械臂的夹爪到达目标物体的位置,但是要实现抓取还要让夹爪等一些关节调整到能抓取的角度该如何实现。希望能抓取一些方块,书等物体,需要进行抓取姿态分析吗?这是我的机械臂的样子

-
RE: 如何实现机械臂的视觉抓取发布在 综合问题
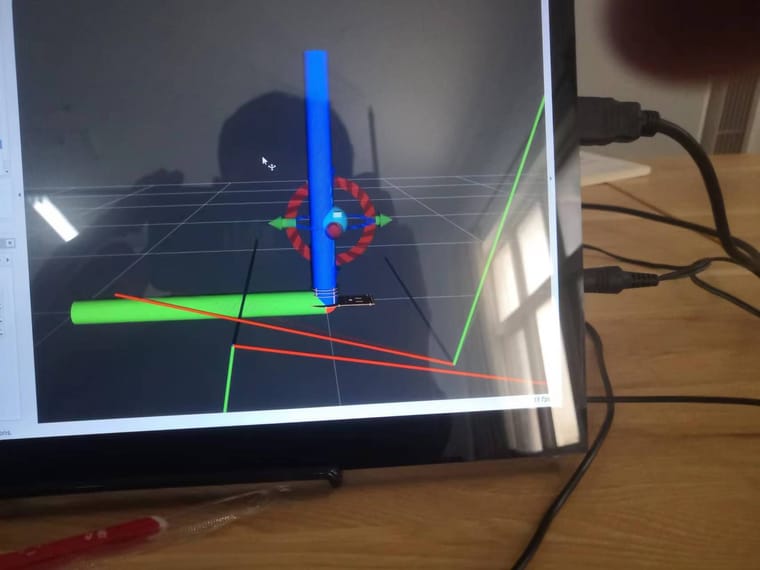
@小元不圆 可以帮我检查一下我的坐标系,是不是对的吗,感觉最后得到的坐标系变换结果不对,最粗的那个坐标系是机械臂基座的,坐标的细线坐标系是相机的,右边的细线坐标系是物体的。