ros2中如何将单线雷达的2D:laser_scan数据转换成3D:pointcloud2类型数据
-
各位大佬们,我想问的如题!
-
同样想问!!!求大佬解答!
-
@sen 请看这个包:https://github.com/ros-perception/pointcloud_to_laserscan/tree/humble
接下来说说怎么用
安装
首先是安装,直接下载安装或者apt直接的装都可以.推荐apt
sudo apt install ros-humble-pointcloud-to-laserscansudo apt install ros-humble-pointcloud-to-laserscan [sudo] fishros 的密码: 正在读取软件包列表... 完成 正在分析软件包的依赖关系树... 完成 正在读取状态信息... 完成 下列软件包是自动安装的并且现在不需要了: ....... 使用'sudo apt autoremove'来卸载它(它们)。 下列【新】软件包将被安装: ros-humble-pointcloud-to-laserscan 升级了 0 个软件包,新安装了 1 个软件包,要卸载 0 个软件包,有 536 个软件包未被升级。 需要下载 253 kB 的归档。 解压缩后会消耗 1,434 kB 的额外空间。 获取:1 http://mirrors.tuna.tsinghua.edu.cn/ros2/ubuntu jammy/main amd64 ros-humble-pointcloud-to-laserscan amd64 2.0.1-3jammy.20221108.191144 [253 kB] 已下载 253 kB,耗时 2秒 (145 kB/s) 正在选中未选择的软件包 ros-humble-pointcloud-to-laserscan。 进度:[ 100%]使用
这个包可以帮我们直接把雷达话题数据转换成点云话题数据发布出来,所以你啥都不用干,提供必要信息,直接运行这个节点就可以了
随手新建一个launch文件,test_laserscan2pcl2.py,写入下面内容
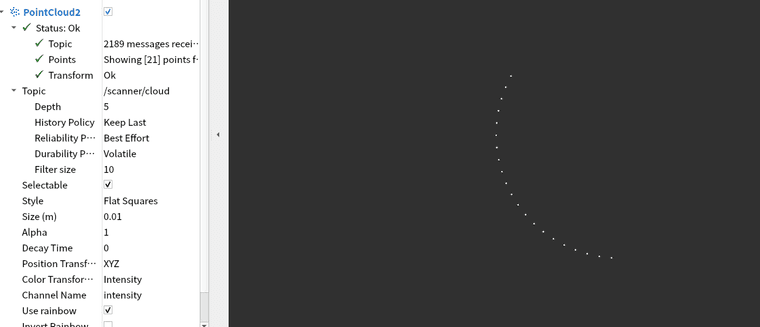
from launch import LaunchDescription from launch.actions import DeclareLaunchArgument from launch.actions import ExecuteProcess from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node import yaml def generate_launch_description(): return LaunchDescription([ DeclareLaunchArgument( name='scanner', default_value='scanner', description='Namespace for sample topics' ), ExecuteProcess( cmd=[ 'ros2', 'topic', 'pub', '-r', '10', '--qos-profile', 'sensor_data', [LaunchConfiguration(variable_name='scanner'), '/scan'], 'sensor_msgs/msg/LaserScan', yaml.dump({ 'header': {'frame_id': 'scan'}, 'angle_min': -1.0, 'angle_max': 1.0, 'angle_increment': 0.1, 'range_max': 10.0, 'ranges': [1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1, 1] }) ], name='scan_publisher' ), Node( package='tf2_ros', executable='static_transform_publisher', name='static_transform_publisher', arguments=[ '--x', '0', '--y', '0', '--z', '0', '--qx', '0', '--qy', '0', '--qz', '0', '--qw', '1', '--frame-id', 'map', '--child-frame-id', 'scan' ] ), Node( package='pointcloud_to_laserscan', executable='laserscan_to_pointcloud_node', name='laserscan_to_pointcloud', remappings=[('scan_in', [LaunchConfiguration(variable_name='scanner'), '/scan']), ('cloud', [LaunchConfiguration(variable_name='scanner'), '/cloud'])], parameters=[{'target_frame': 'scan', 'transform_tolerance': 0.01}] ), ])接着直接ros2 launch test_laserscan2pcl2.py ,接着我们就可以打开rviz2来看看这些数据,或者用ros2 topic list 或者echo出来了
上一个rviz的图
-
@sen 已回答,请查看上一条回复!
-
@小鱼 谢谢小鱼,想请问一下,带message_fliter的转换和不带的转换在数据上有什么差别,哪个更有优势一点呢?
-
@sen message_fliter 主要是用于消息过滤和同步使用,如果想将雷达数据和点云数据在时间上对齐或者做其他操作,可以使用message_fliter
-
@小鱼 这个在时间上对齐是指,从第一帧转换数据往后,让点云数据的间隔和雷达数据的间隔相同吗?我对这方面了解比较少,问题可能比较笨,谢谢小鱼了
-
@sen 如果我没理解错是这样,让你接收的雷达点数据和点云数据时间上匹配,也就是同一刻的数据
-
@小鱼 好的,谢谢小鱼
-
此回复已被删除!