Ubuntu18安装ROS,init步骤失败
-
@小鱼 是的,点击了窗口,但是还是不行,也不知道为啥,正常应该是点击窗口,用上下左右就可以运动了,但是我试了,点击窗口后,无论是使用上下左右,wasd,还是其他按键,都是不好使,没反应
-
@waqwb 用ijkl试试呢
-
@小鱼 所有按键都试了,都没反应,也不知道为啥
-
@waqwb 你点的是哪个窗口,截图一下
-
@小鱼
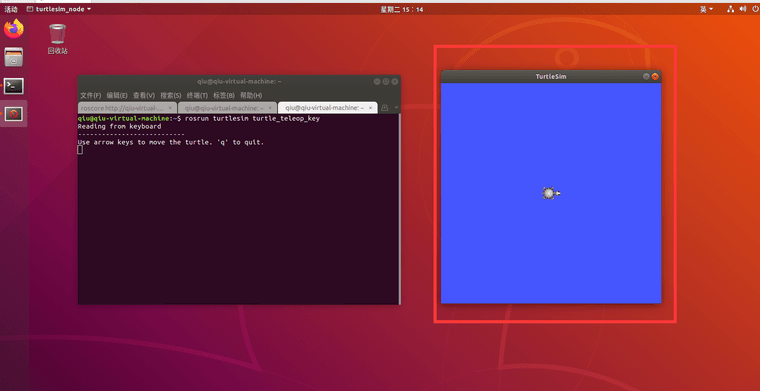
已经点击这个TurtleSim窗口,并且还推拽了一下,确保焦点是在这个窗口,按键盘任意键都不好用 -
@小鱼 我做的笔记,先是

然后update和upgrade更新了下,接下来使用一件安装,执行顺序是5---1---3,然后初始化rosdepc,之后执行了4更新设置,然后测试小乌龟,就是不好用 -
Ubuntu中安装ROS
一、官网安装(极有可能失败)
http://wiki.ros.org/ROS/Installation
1、更换源

2、添加ROS软件源
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.ustc.edu.cn/ros/ubuntu/ $DISTRIB_CODENAME main" > /etc/apt/sources.list.d/ros-latest.list'3、添加密钥
# sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 421C365BD9FF1F717815A3895523BAEEB01FA116 sudo apt-get install curl curl -sSL 'http://keyserver.ubuntu.com/pks/lookup?op=get&search=0xC1CF6E31E6BADE8868B172B4F42ED6FBAB17C654' | sudo apt-key add -4、更新
sudo apt-get update5、安装
sudo apt install ros-melodic-desktop-full6、初始化rosdep
# sudo rosdep init # 失败 sudo apt-get install python3-pip sudo pip3 install rosdepc sudo rosdepc init sudo rosdepc update7、设置环境变量
# ROS-RELEASE代表希望使用的ROS版本(如lunar、kinetic、indigo、hydro、groovy等)。 # echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc echo "source /opt/ros/ROS-RELEASE/setup.bash" >> ~/.bashrc source ~/.bashrc查看当前系统版本
cat /proc/version
查看当前ROS发行版本
echo $ROS_DISTRO
8、构建工厂依赖
到目前为止,你已经安装了运行核心 ROS 包所需的内容。为了创建和管理自己的 ROS 工作区,有各种各样的工具和需求分别分布。例如:rosinstall 是一个经常使用的命令行工具,它使你能够轻松地从一个命令下载许多 ROS 包的源树。
要安装这个工具和其他构建ROS包的依赖项,请运行:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential二、一键安装(推荐)
1、更换源
首先确保在软件和更新中,如图所示
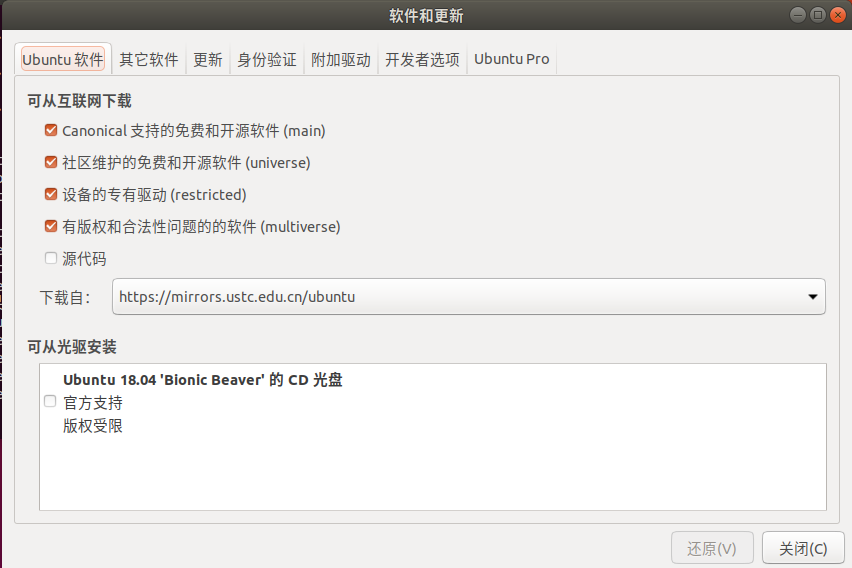
当然,这里选择其他国内源也是可以的
2、更新系统
sudo apt-get update sudo apt-get upgrade3、一键安装
wget http://fishros.com/install -O fishros && . fishros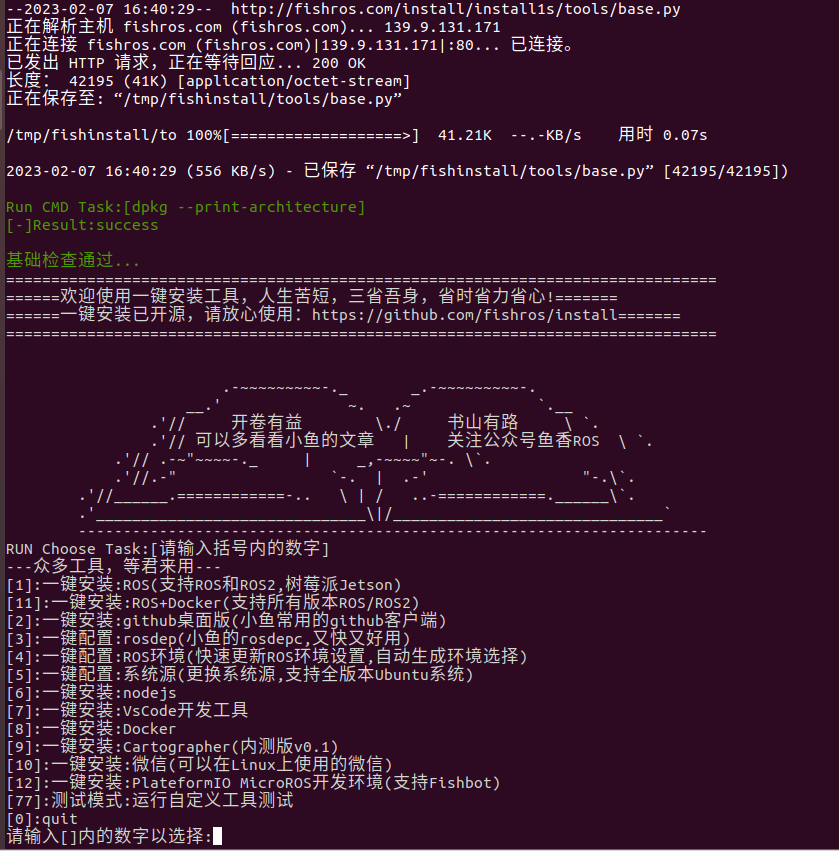
选择顺序
5--1--3
4、初始化rosdep
sudo rosdepc init sudo rosdepc update然后执行4,更新设置
三、测试
roscore # 启动ROS Master rosrun turtlesim turtlesim_node rosrun turtlesim turtle_teleop_key -
@waqwb 需要点击键盘窗口,不是小乌龟窗口
-
@小鱼 软键盘么?键盘窗口?最后启动的那个命令窗口么?
-
@小鱼 感谢鱼神,成功了