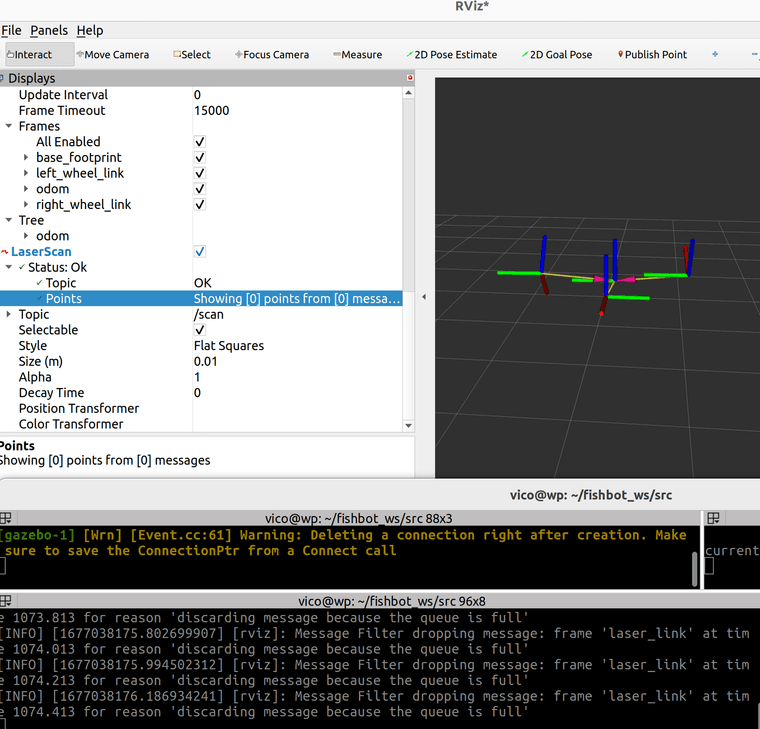
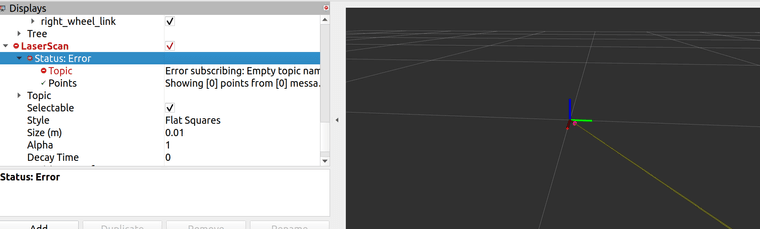
gazebo与rviz 联调时,在Rviz 模块中打开LaserScan模块时提示出错
-
 vico@wp:~/fishbot_ws/src$ ros2 topic info /scan
vico@wp:~/fishbot_ws/src$ ros2 topic info /scan
Type: sensor_msgs/msg/LaserScan
Publisher count: 1
Subscription count: 0 -
@vico1999 机器人是不是摔倒了,ros2 topic echo 看看能不能看到数据
-
@小鱼 argument source_frame - frame does not exist
at line 93 in ./src/buffer_core.cpp
Warning: Invalid frame ID "base_link" passed to canTransform argument source_frame - frame does not exist
at line 93 in ./src/buffer_core.cppRVIZ的终端打开窗口有以上提示信息,
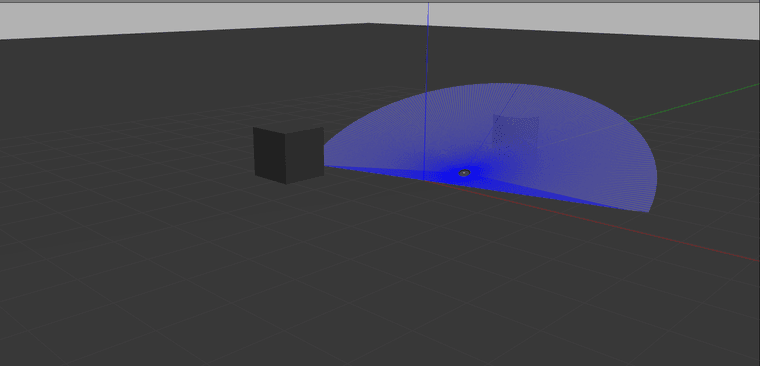
在另外一个终端下打开ros2 topic echo /scan。 看到有打印,是0 或是inifi 总的看来激光的topic信息有发布。看来问题在rviz这里。我准备重装一下rviz试试 -
重装了还是不行。
-
- 0.0
- 0.0
- 0.0
- 0.0
- '...'
header:
stamp:
sec: 1206
nanosec: 22000000
frame_id: laser_link
angle_min: 0.0
angle_max: 6.28000020980835
angle_increment: 0.01749303564429283
time_increment: 0.0
scan_time: 0.0
range_min: 0.11999999731779099
range_max: 3.5
ranges:- .inf
-
点击reset后在topic栏可以勾选/scanl了,不过沟选后,视图还是没有 变化。 也没有出现点云。 超声波模块也出现同样的问题。在终端显示INFO] [1677037604.558626896] [rviz]: Message Filter dropping message: frame 'ultrasonic_sensor_link' at time 504.804 for reason 'discarding message because the queue is full'
-