Your browser does not seem to support JavaScript. As a result, your viewing experience will be diminished, and you have been placed in read-only mode.
Please download a browser that supports JavaScript, or enable it if it's disabled (i.e. NoScript).
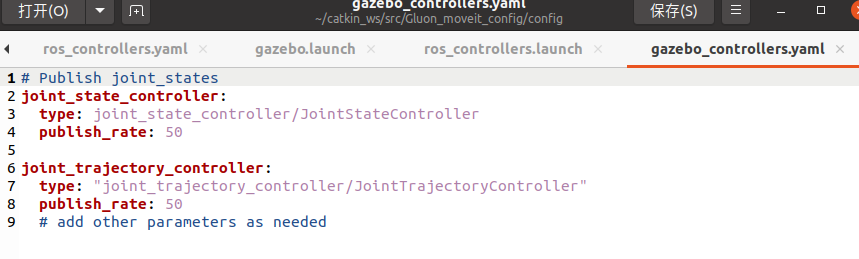
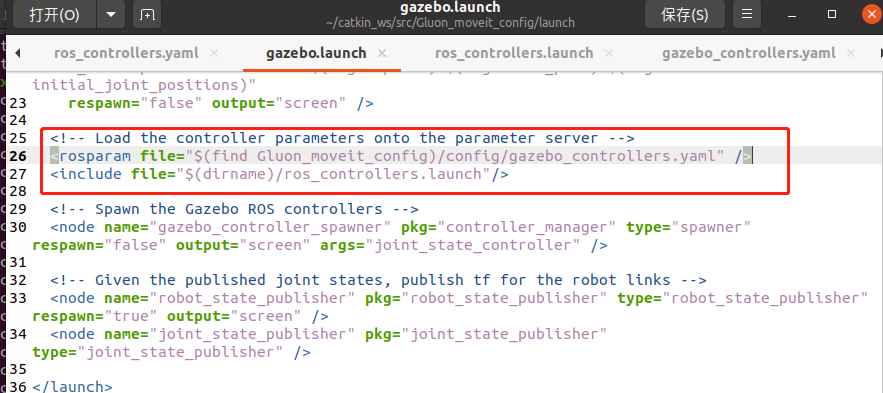
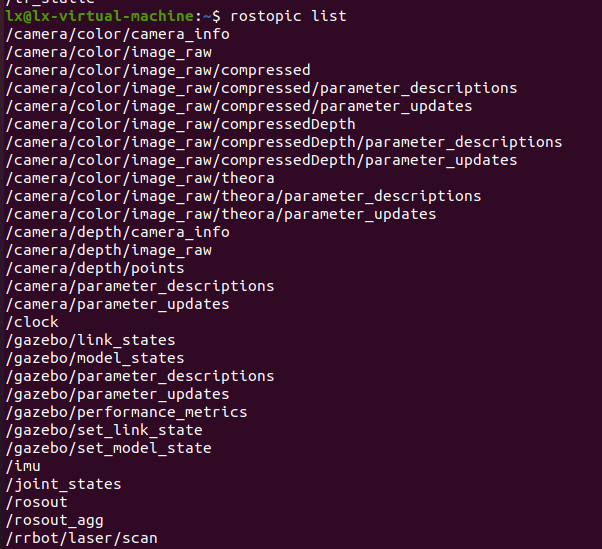
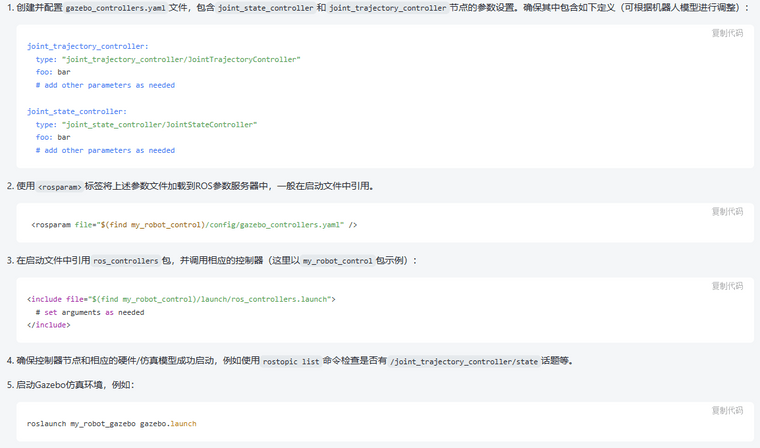
1、按照如下步骤设计好启动文件和控制器文件 [图片] 我的gazebo_controllers.yaml文件如下 我的gazebo.launch文件如下 2、启动roslaunch Gluon_moveit_config gazebo.launch 3、rostopic list之后没有/joint_trajectory_controller/state
 [图片]
[图片]