@小鱼 是的,我下载的命令都是ros humble;gazebo都没有下载gazebo11/9这样的。想实现windows下matlab和ubuntu下gazebo通信;网上大多教程都是roscore查看ip,然后我用的ifconfig查看ip,想着在matlab试一试通信, ,但是这样通信不成功。
,但是这样通信不成功。
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
767015514 发布的最佳帖子
-
RE: roscore 无法运行发布在 ROS2
767015514 发布的最新帖子
-
虚拟环境下ros手眼标定无法aruco_single/result显示二维码的坐标系发布在 综合问题
1、安装了aruco_ros包
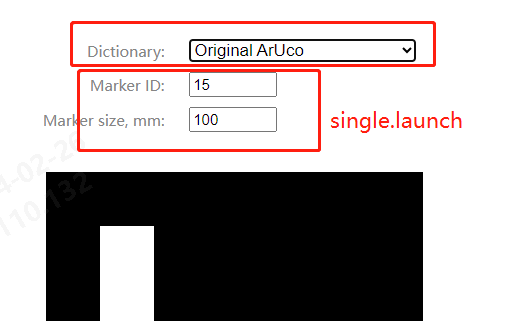
修改single.launch文件<launch> <arg name="markerId" default="36"/> <arg name="markerSize" default="0.1"/> <!-- in m --> <arg name="eye" default="left"/> <arg name="marker_frame" default="aruco_marker_frame"/> <arg name="ref_frame" default=""/> <!-- leave empty and the pose will be published wrt param parent_name --> <arg name="corner_refinement" default="LINES" /> <!-- NONE, HARRIS, LINES, SUBPIX --> <node pkg="aruco_ros" type="single" name="aruco_single"> <remap from="/camera_info" to="/camera/color/camera_info" /> <remap from="/image" to="/camera/color/image_raw" /> <param name="image_is_rectified" value="True"/> <param name="marker_size" value="$(arg markerSize)"/> <param name="marker_id" value="$(arg markerId)"/> <param name="reference_frame" value="$(arg ref_frame)"/> <!-- frame in which the marker pose will be refered --> <param name="camera_frame" value="camera_link"/> <param name="marker_frame" value="$(arg marker_frame)" /> <param name="corner_refinement" value="$(arg corner_refinement)" /> </node> </launch>(是不是markerId和markerSize有问题?我是根据这个网址)生成的ID设置的。
2、安装了moveit_calibrition手眼标定包
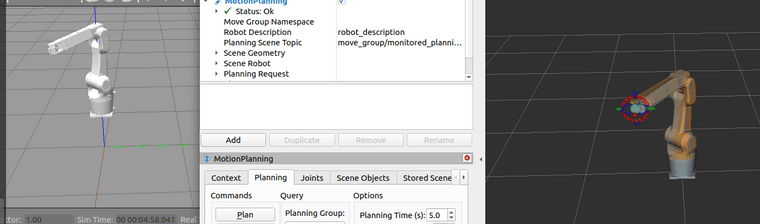
3、运行:roslaunch xxxmoveit_config demo_gazebo.launch,rviz和gazebo可以正常打开并运行
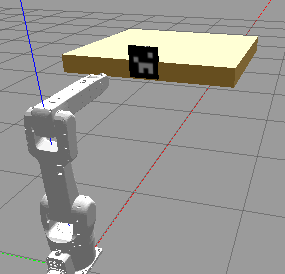
gazebo中插入一个带有aruco码的模型
4、运行:roslaunch aruco_ros demo.launch
rosrun image_view image_view image:=/aruco_single/result

画面没有显示码的坐标系? -
RE: rqt查看话题发布情况,发现/joint_state的Position一直为0发布在 综合问题
@小鱼 意思就是gazebo里面的控制器并没有控制,只是simulink里面的控制指令让gazebo机械臂运动起来了?
-
rqt查看话题发布情况,发现/joint_state的Position一直为0发布在 综合问题
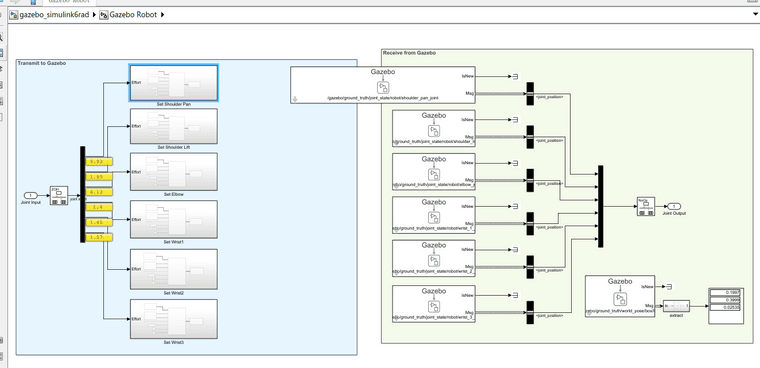
1、实现了simulink同步控制gazebo机械臂仿真,也就是windows系统下的matlab搭建出机械臂的控制模型
2、在ubuntu虚拟机20.04下有ros-noetic以及gazebo11,配置一些文件之后实现了simulink里面的机械臂的关节信息实时传递给gazebo机械臂,实现同步运行:
3、用rqt查看话题的发布情况如下:
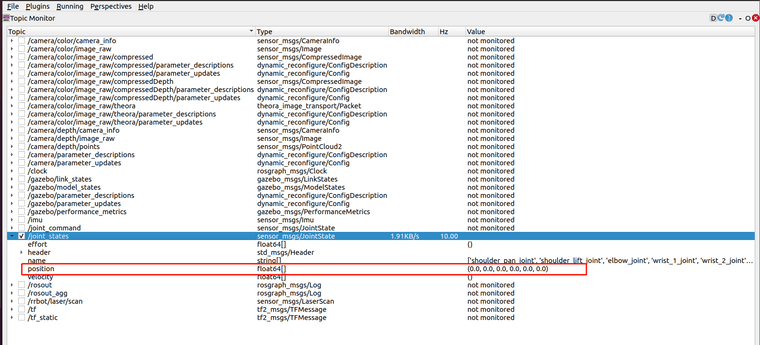
同时用命令获取信息得到同样为0
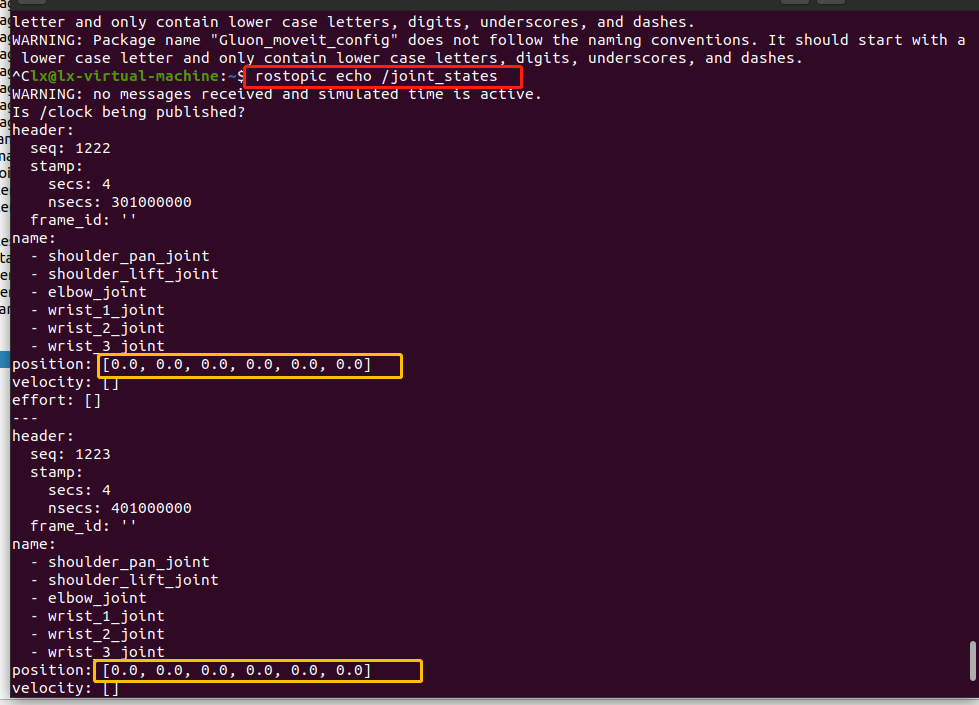
4、为什么会出现上述问题?simulink里面的回传模块是有数据的
5、如何解决上述问题?因为用matlab编程和ros实现通信的时候,matlab程序无法控制gazebo机械臂模型动起来。因为matlab编程的时候/joint_state的Position也一直为0
-
/joint_trajectory_controller/state话题发布在 综合问题
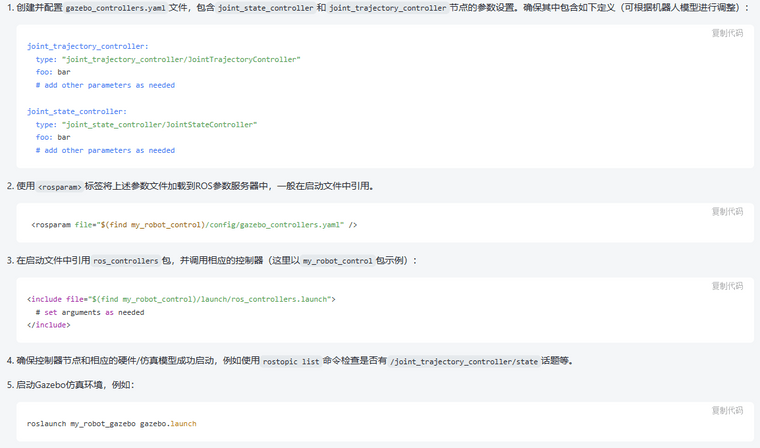
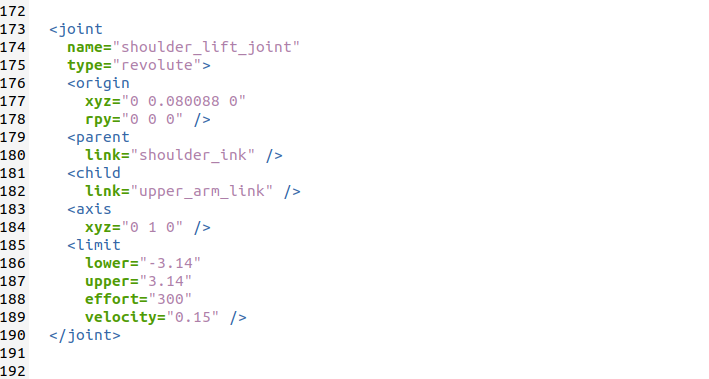
1、按照如下步骤设计好启动文件和控制器文件
 [图片]
[图片]
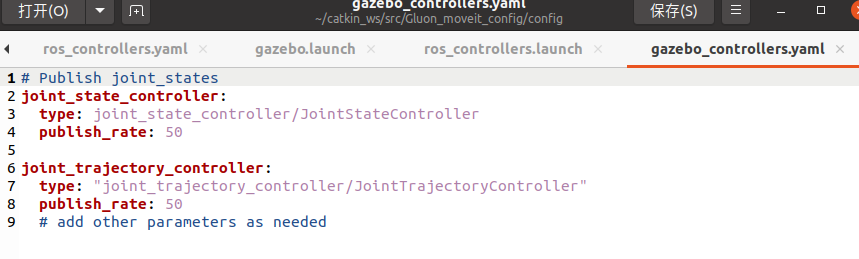
我的gazebo_controllers.yaml文件如下
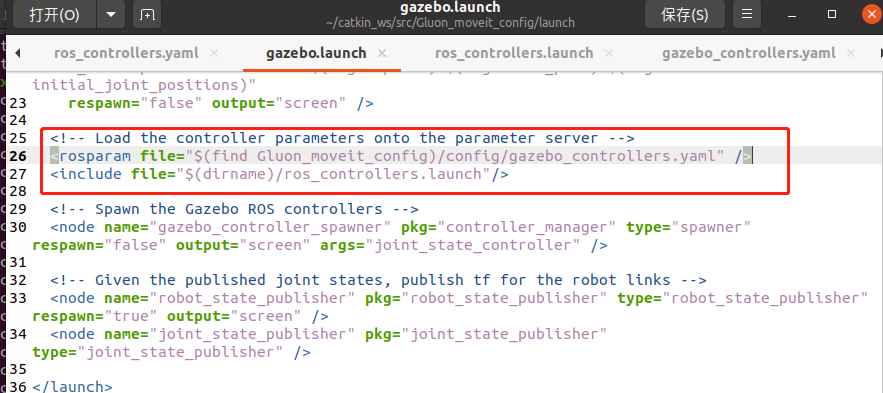
我的gazebo.launch文件如下
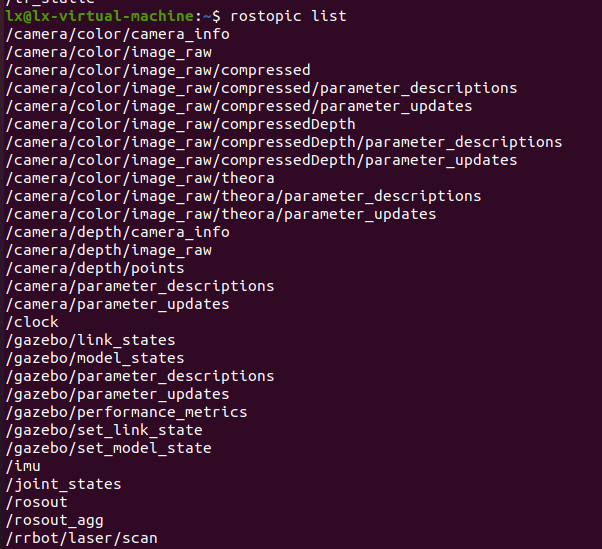
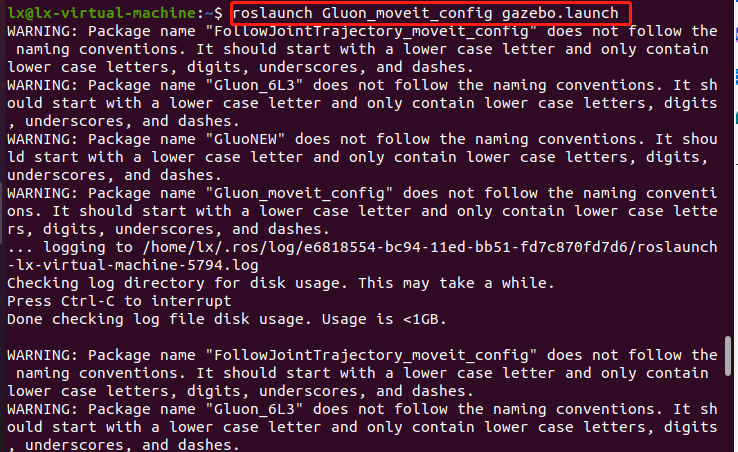
2、启动roslaunch Gluon_moveit_config gazebo.launch

3、rostopic list之后没有/joint_trajectory_controller/state
-
RE: simulink和gazebo仿真,gazebo模型回到原位不动发布在 综合问题
@小鱼 在urdf文件里面是这样的
在simulink的模型里面
下面这个gazebo和simulink的反馈部分就和官网示例是一模一样的了。
-
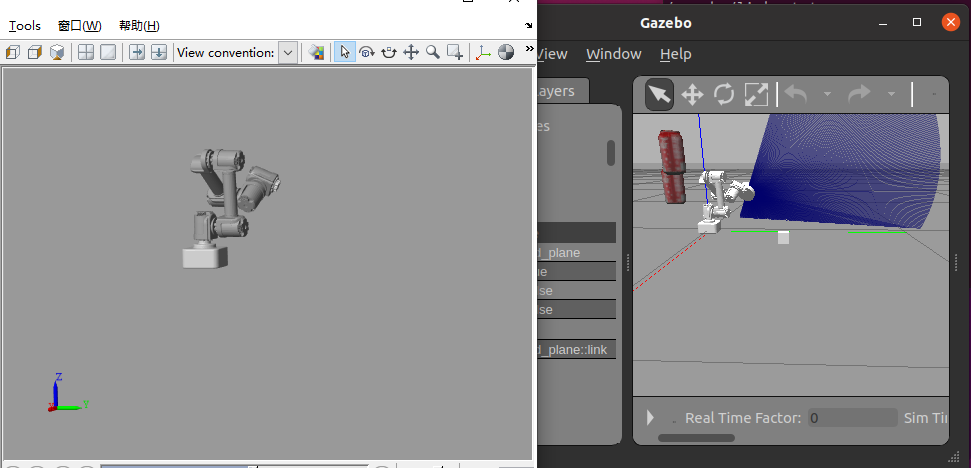
simulink和gazebo仿真,gazebo模型回到原位不动发布在 综合问题
1、参考matlab官网的示例:https://www.mathworks.com/help/robotics/ug/control-manipulator-robot-with-co-simulation.html
2、终端输入:roslaunch xxxx_moveit_config gazebo.launch
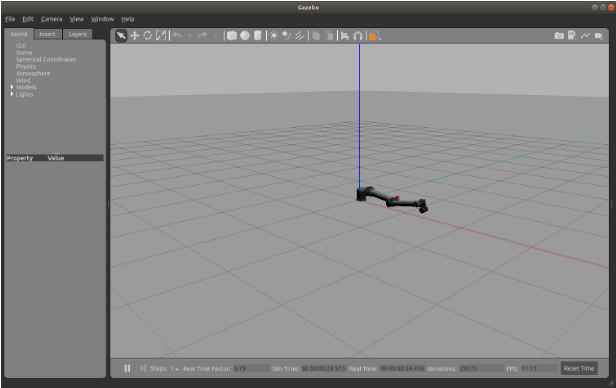
3、弹出的gazebo显示如下,得到最原始的位置
4、点击simulink的运行之后
5、经过一系列机械臂的‘自我调整’,会慢慢往最原始的位置移动
6、最终,移动到刚打开gazebo的界面位置,然后就一直在这个位置稍微抖动,但不会有大移动
7、可以看到gazebo的运动轨迹和simulink的轨迹并没有任何的关系。而且,最后移动到最原始的位置就不会再发生大的运动也是我不知道为什么的点?
8、怀疑是不是Gazebo robot模块的输出问题,但是红色部分的选择项好像只能选择这个最合适。
-
RE: gazebo和simulink联合仿真,gazebo模型反馈的关节位置和simulink关节位置不一致发布在 综合问题
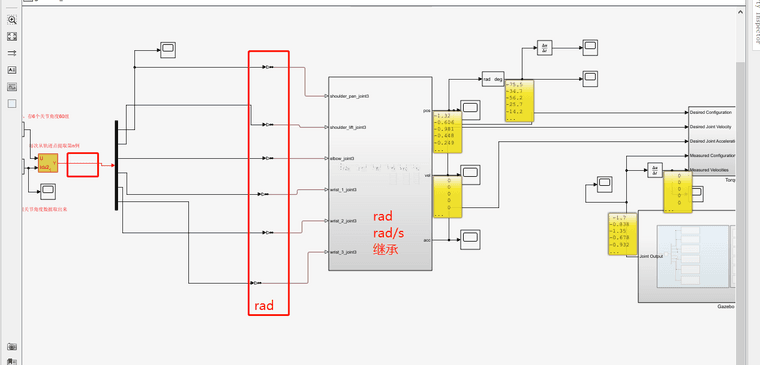
@小鱼 感谢答复!我把simulink模型全部改为弧度,不知道是不是这样改呢
这样改了之后,还是一样的问题
卡了我太久了
-
gazebo和simulink联合仿真,gazebo模型反馈的关节位置和simulink关节位置不一致发布在 综合问题
1、参考mathwork官网模型
https://www.mathworks.com/help/robotics/ug/configure-gazebo-for-co-simulation-of-manipulator.html#ConfigureGazeboAndSimulinkForCosimulationOfManipulatorsExample-5
2、上述示例没有找到.world文件的具体内容,自己写了一个简单的.world文件,
 测试通信成功
测试通信成功
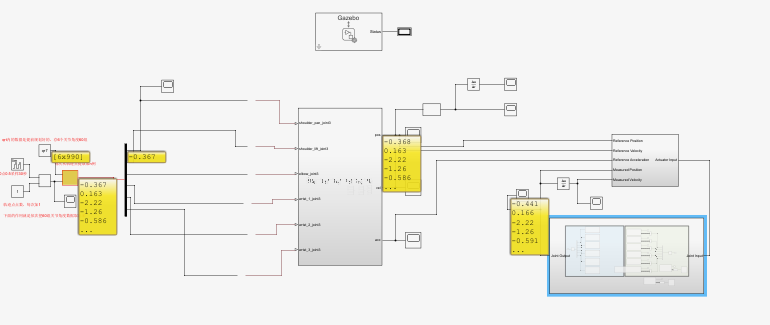
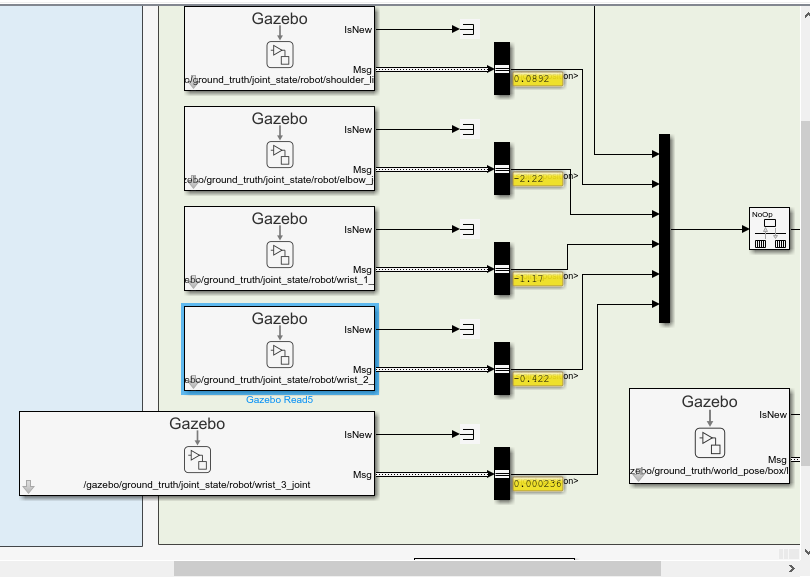
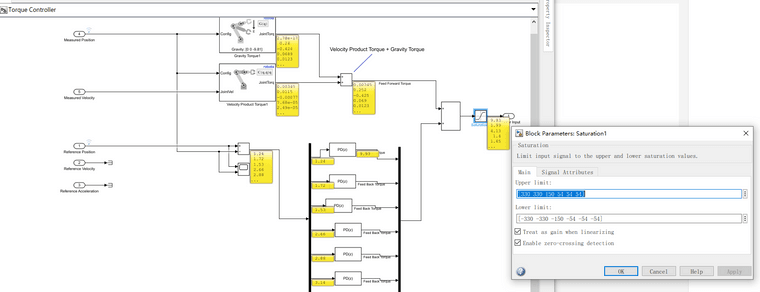
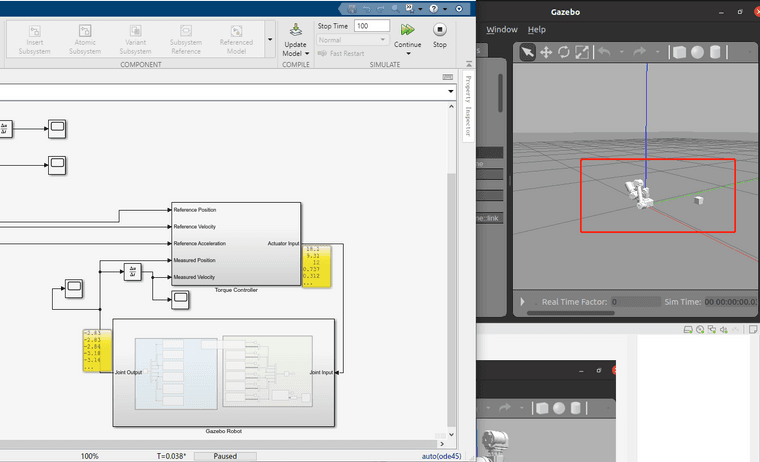
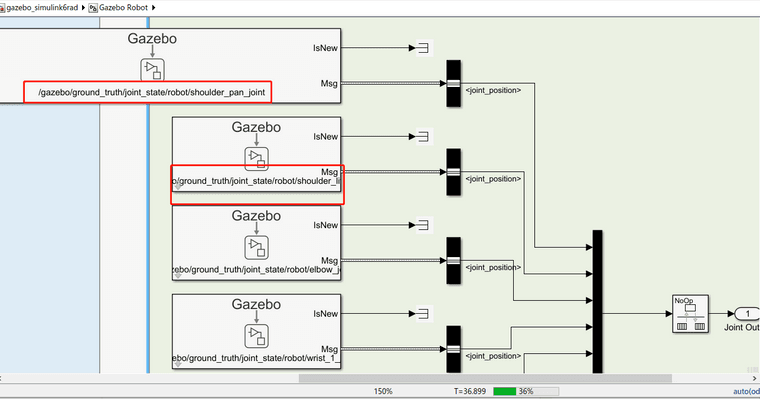
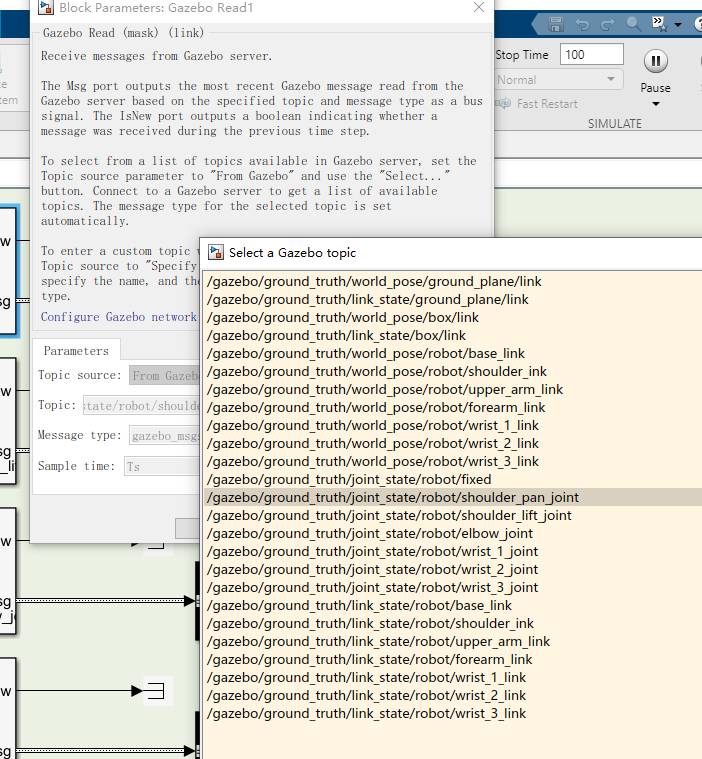
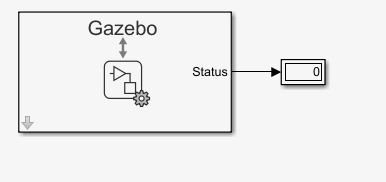
3、参考上述示例的gazebo和simulink的通信模块
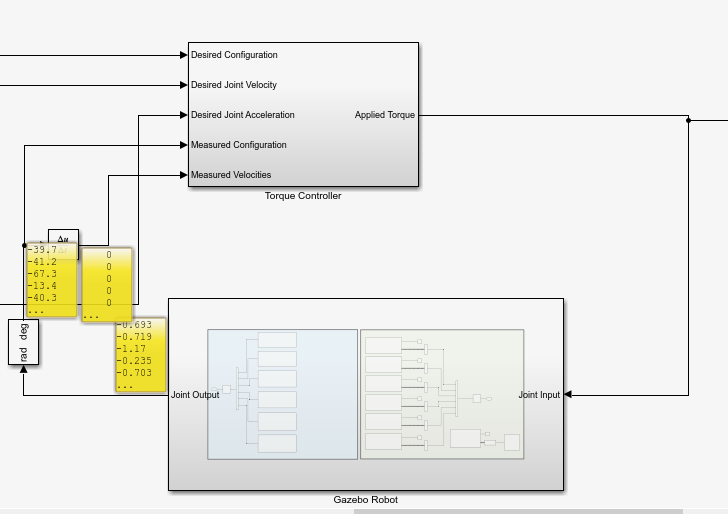 得到gazebo的位置和速度反馈输出到Torque controller
得到gazebo的位置和速度反馈输出到Torque controller
4、Torque controller的前三个输入信号就是轨迹规划得到的关节的位置 速度和加速度信号

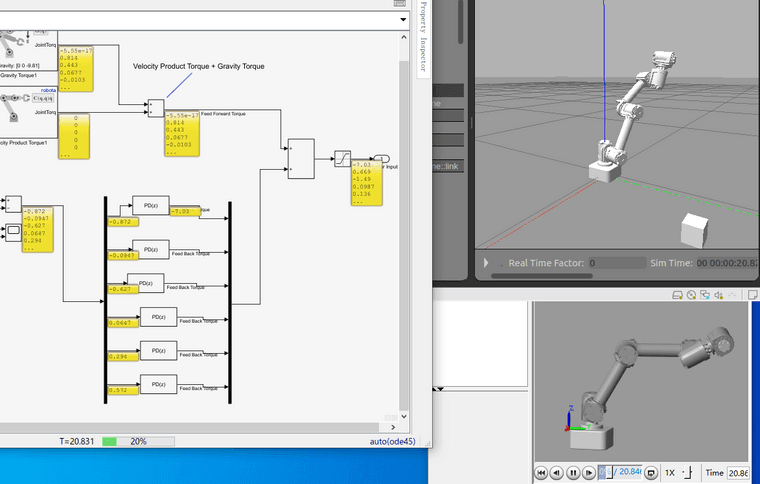
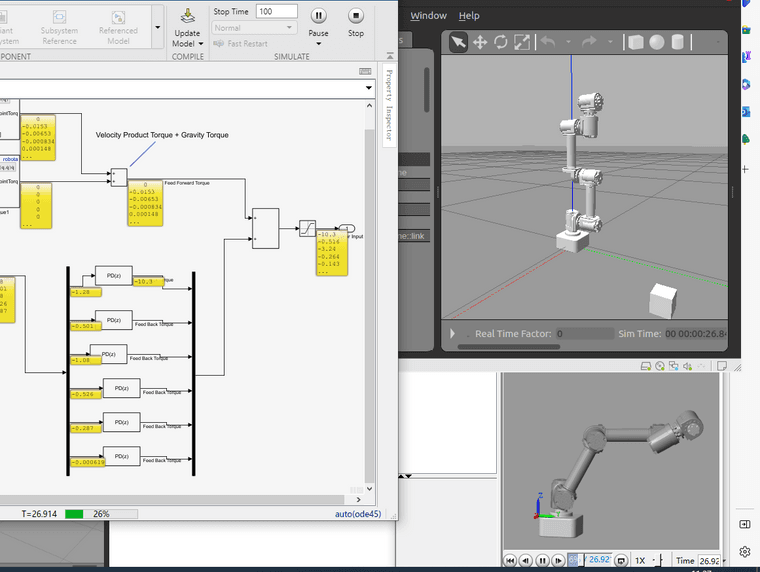
5、点击run之后
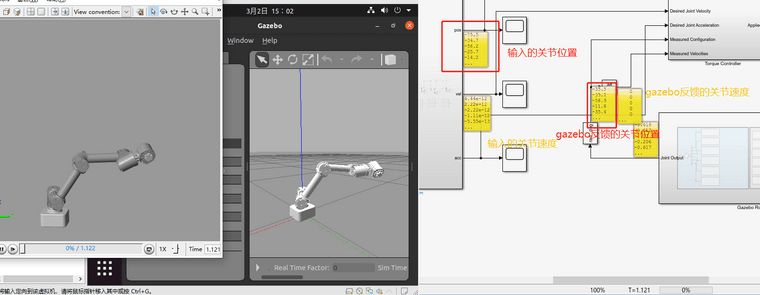
可以看到,Torque controller的前三个输入信号和gazebo的位置和速度信号数据不一致
gazebo的模型也没有按照simulink规划的轨迹进行运动。