[Fishbot-Nav2] 使用官方代码和套件导航部分出错
-
FishBot基础版*1台
装有Ubuntu22.04和ROS2 foxy的台式机
在烧录成功之后直接按照网站上的步骤进行操作的
建图之后,启动雷达并进行导航出现问题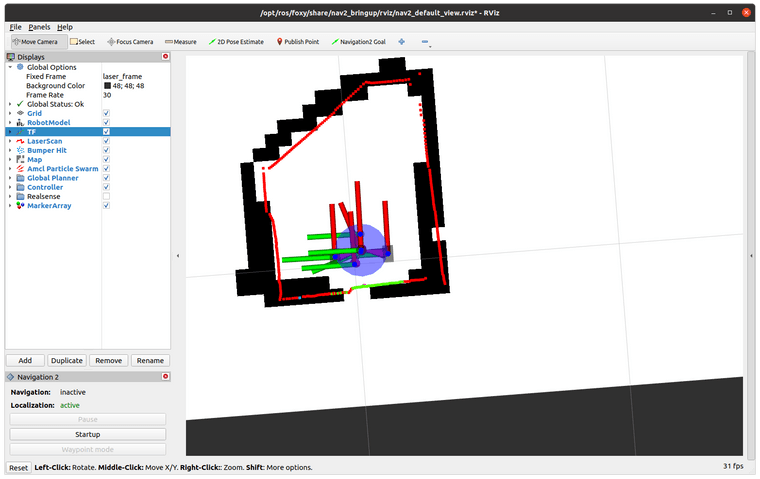 file:///home/water/%E5%9B%BE%E7%89%87/%E5%AF%BC%E8%88%AA%E9%97%AE%E9%A2%981%20navigation%E7%8A%B6%E6%80%81%E4%B8%BAinactive.png
file:///home/water/%E5%9B%BE%E7%89%87/%E5%AF%BC%E8%88%AA%E9%97%AE%E9%A2%981%20navigation%E7%8A%B6%E6%80%81%E4%B8%BAinactive.png
在导航设置小车位置的过程点击 2F Point Estimate 设置点和方向之后,rviz中navigation状态为激活(inactive),无法进行设置Nav2 Goal进行导航
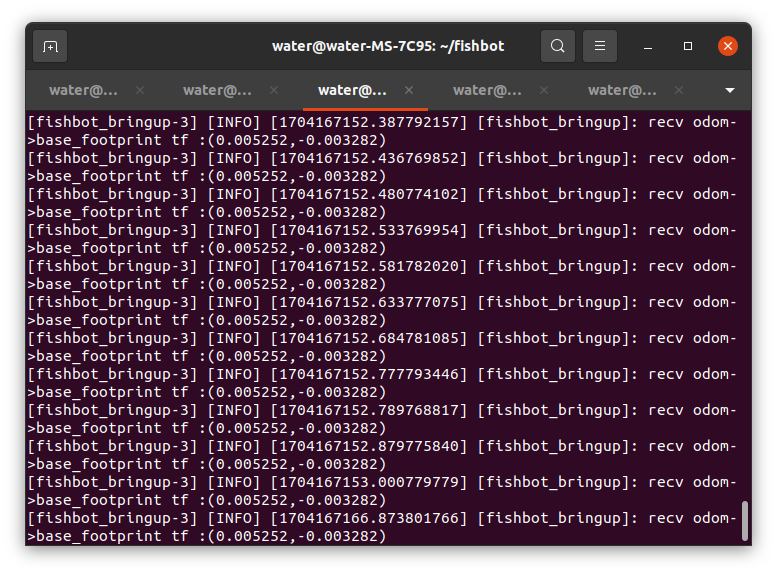
图2:bring_up终端输出
 /home/water/图片/运行一段时间后的雷达终端.png
/home/water/图片/运行一段时间后的雷达终端.png
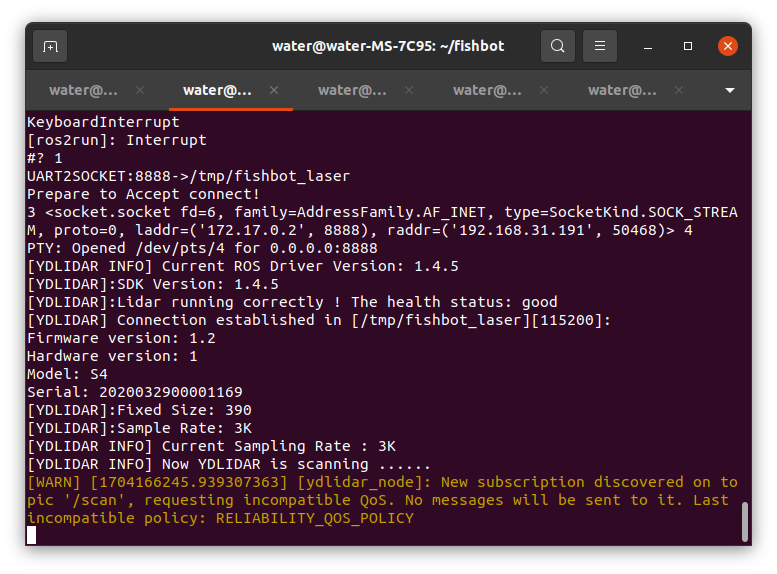
图三:雷达终端输出:提示无法成功获取激光扫描数据,但rviz界面中雷达能够实时检测到新出现和拿走的障碍物
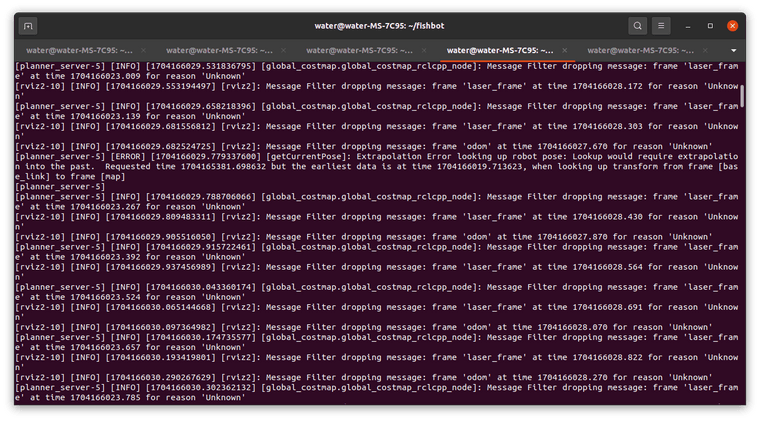
图4:未发布NAV2 goal时rviz终端输出:[rviz2-10] [INFO] [1704165843.579489071] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1704165842.209 for reason 'Unknown'
[rviz2-10] [INFO] [1704165843.675628045] [rviz2]: Message Filter dropping message: frame 'odom' at time 1704165841.670 for reason 'Unknown'
[rviz2-10] [INFO] [1704165843.707778356] [rviz2]: Message Filter dropping message: frame 'laser_frame' at time 1704165842.339 for reason 'Unknown'
[planner_server-5] [INFO] [1704165843.697214607] [global_costmap.global_costmap_rclcpp_node]: Message Filter dropping message: frame 'laser_frame' at time 1704165837.161 for reason 'Unknown'
[planner_server-5] [INFO] [1704165843.833627778] [global_costmap.global_costmap_rclcpp_node]: Message Filter dropping message: frame 'laser_frame' at time 1704165837.351 for reason 'Unknown'
显示消息过滤器错误,
[planner_server-5] [ERROR] [1704165843.777807751] [getCurrentPose]: Extrapolation Error looking up robot pose: Lookup would require extrapolation into the past. Requested time 1704165381.698632 but the earliest data is at time 1704165833.635287, when looking up transform from frame [base_link] to frame [map]
在planner_server的getCurrentPose函数中发生了坐标变换错误
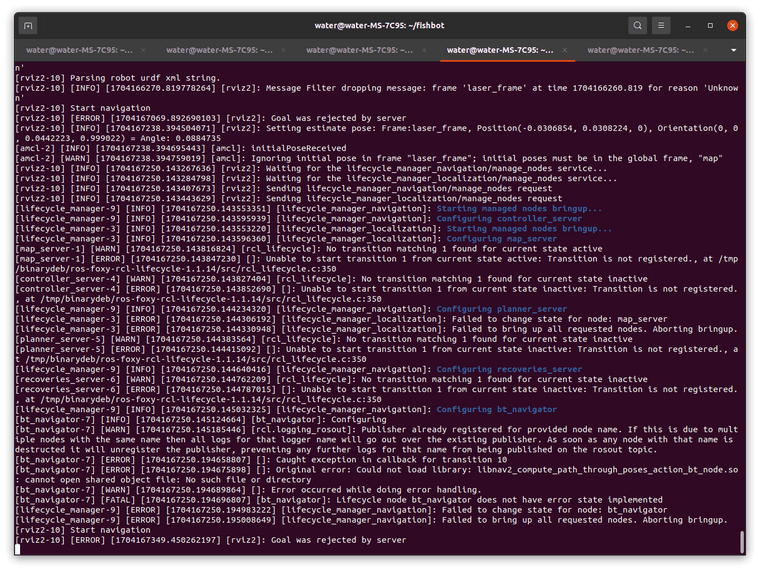
图5:导航失败的rviz终端输出:目标被服务器拒绝,出现节点状态转换问题,map_server 状态转换问题以下为节点列表
(base) water@water-MS-7C95:~/fishbot$ ros2 topic list
/bt_navigator/transition_event
/clicked_point
/cmd_vel
/controller_server/transition_event
/cost_cloud
/downsampled_costmap
/downsampled_costmap_updates
/evaluation
/global_costmap/costmap
/global_costmap/costmap_raw
/global_costmap/costmap_updates
/global_costmap/footprint
/global_costmap/global_costmap/transition_event
/global_costmap/published_footprint
/global_costmap/voxel_marked_cloud
/goal_pose
/imu
/initialpose
/joint_states
/local_costmap/clearing_endpoints
/local_costmap/costmap
/local_costmap/costmap_raw
/local_costmap/costmap_updates
/local_costmap/footprint
/local_costmap/local_costmap/transition_event
/local_costmap/published_footprint
/local_costmap/voxel_grid
/local_costmap/voxel_marked_cloud
/local_plan
/map
/map_server/transition_event
/map_updates
/marker
/mobile_base/sensors/bumper_pointcloud
/odom
/parameter_events
/particlecloud
/plan
/planner_server/transition_event
/received_global_plan
/recoveries_server/transition_event
/robot_description
/rosout
/scan
/tf
/tf_static
/transformed_global_plan
/waypoint_follower/transition_event
/waypoints以下为tf树
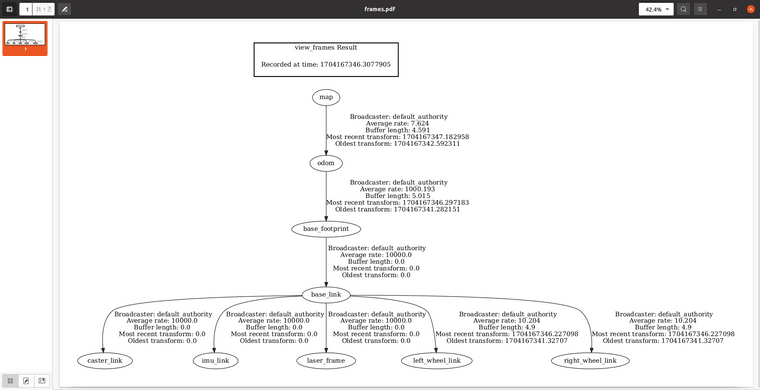
rviz界面雷达能正常识别出现和拿走的障碍物
-