Action client not connected: gluon_controller/follow_joint_trajectory
-
主要问题:
Waiting for gluon_controller/follow_joint_trajectory to come up
Waiting for gluon_controller/follow_joint_trajectory to come up
Action client not connected: gluon_controller/follow_joint_trajectory

问题描述:
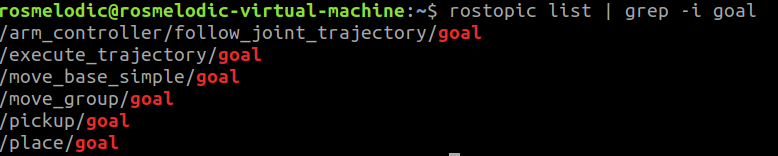
follow_joint_trajectory始终处于打不开的状态,可以从下面出问题机械臂和正常机械臂的rostopic 和rqt_graph看出,关键就是没有follow_joint_trajectory
背景:
rostopic list | grep -i goal
出问题的机械臂

可以正常运行ur机械臂
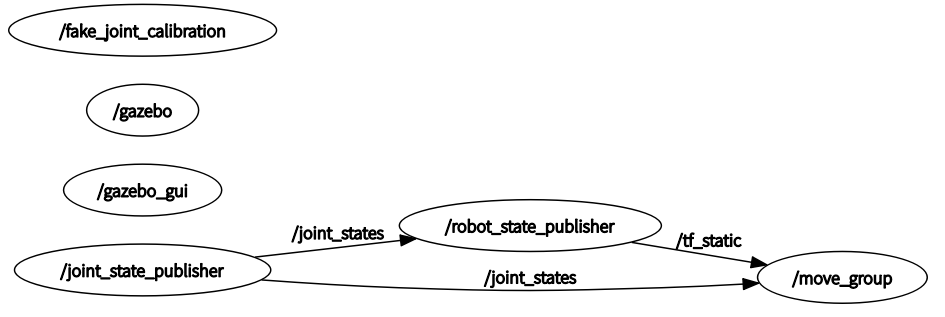
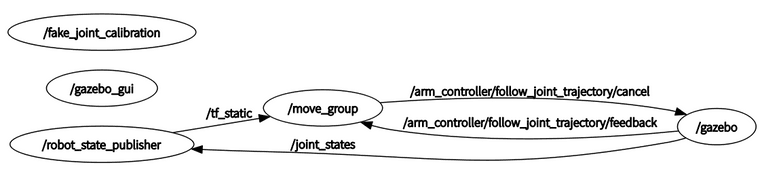
rqt_graph
出问题的机械臂
可以正常运行ur机械臂
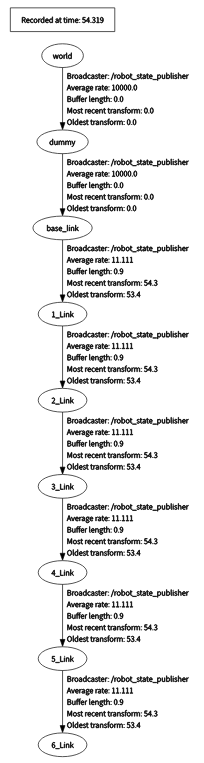
tf_tree
完整topic
/attached_collision_object /calibrated /clicked_point /clock /collision_object /execute_trajectory/cancel /execute_trajectory/feedback /execute_trajectory/goal /execute_trajectory/result /execute_trajectory/status /gazebo/link_states /gazebo/model_states /gazebo/parameter_descriptions /gazebo/parameter_updates /gazebo/set_link_state /gazebo/set_model_state /gluon/joint_states /head_mount_kinect/depth_registered/camera_info /head_mount_kinect/depth_registered/image_raw /head_mount_kinect/depth_registered/points /initialpose /joint_states /move_base_simple/goal /move_group/camera_info /move_group/cancel /move_group/display_contacts /move_group/display_planned_path /move_group/feedback /move_group/filtered_cloud /move_group/filtered_cloud/compressed /move_group/filtered_cloud/compressed/parameter_descriptions /move_group/filtered_cloud/compressed/parameter_updates /move_group/filtered_cloud/compressedDepth /move_group/filtered_cloud/compressedDepth/parameter_descriptions /move_group/filtered_cloud/compressedDepth/parameter_updates /move_group/filtered_cloud/theora /move_group/filtered_cloud/theora/parameter_descriptions /move_group/filtered_cloud/theora/parameter_updates /move_group/filtered_label /move_group/filtered_label/compressed /move_group/filtered_label/compressed/parameter_descriptions /move_group/filtered_label/compressed/parameter_updates /move_group/filtered_label/compressedDepth /move_group/filtered_label/compressedDepth/parameter_descriptions /move_group/filtered_label/compressedDepth/parameter_updates /move_group/filtered_label/theora /move_group/filtered_label/theora/parameter_descriptions /move_group/filtered_label/theora/parameter_updates /move_group/goal /move_group/model_depth /move_group/model_depth/compressed /move_group/model_depth/compressed/parameter_descriptions /move_group/model_depth/compressed/parameter_updates /move_group/model_depth/compressedDepth /move_group/model_depth/compressedDepth/parameter_descriptions /move_group/model_depth/compressedDepth/parameter_updates /move_group/model_depth/theora /move_group/model_depth/theora/parameter_descriptions /move_group/model_depth/theora/parameter_updates /move_group/monitored_planning_scene /move_group/ompl/parameter_descriptions /move_group/ompl/parameter_updates /move_group/plan_execution/parameter_descriptions /move_group/plan_execution/parameter_updates /move_group/planning_scene_monitor/parameter_descriptions /move_group/planning_scene_monitor/parameter_updates /move_group/result /move_group/sense_for_plan/parameter_descriptions /move_group/sense_for_plan/parameter_updates /move_group/status /move_group/trajectory_execution/parameter_descriptions /move_group/trajectory_execution/parameter_updates /pickup/cancel /pickup/feedback /pickup/goal /pickup/result /pickup/status /place/cancel /place/feedback /place/goal /place/result /place/status /planning_scene /planning_scene_world /recognized_object_array /rosout /rosout_agg /rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/feedback /rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/update /rviz_moveit_motion_planning_display/robot_interaction_interactive_marker_topic/update_full /rviz_rosmelodic_virtual_machine_3862_6057847670560700822/motionplanning_planning_scene_monitor/parameter_descriptions /rviz_rosmelodic_virtual_machine_3862_6057847670560700822/motionplanning_planning_scene_monitor/parameter_updates /tf /tf_static /trajectory_execution_event * 列表尝试过的思路:
1、有东西未安装:已尝试,未果
2、命名空间:
许多人的解决思路是使命名空间相同,但我看我的命名空间是一致的。
ros_controllers.yaml中名字即使换成下面这个依旧有相同报错
joint_state_controller:
-name:gluon/gluon_controller下面是yaml文件:
gluon_controllers.yaml
gluon: gluon_controller: type: "position_controllers/JointTrajectoryController" joints: - axis_joint_1 - axis_joint_2 - axis_joint_3 - axis_joint_4 - axis_joint_5 - axis_joint_6 gains: axis_joint_1: {p: 100, i: 0.01, d: 10.0} axis_joint_2: {p: 100, i: 0.01, d: 10.0} axis_joint_3: {p: 100, i: 0.01, d: 10.0} axis_joint_4: {p: 100, i: 0.01, d: 10.0} axis_joint_5: {p: 100, i: 0.01, d: 10.0} axis_joint_6: {p: 100, i: 0.01, d: 10.0}gluon_joint_state_controller.yaml
gluon: joint_state_controller: type: joint_state_controller/JointStateController publish_rate: 50ros_controllers.yaml
controller_manager_ns: '' controller_list: - name: gluon_controller action_ns: follow_joint_trajectory type: FollowJointTrajectory default: true joints: - axis_joint_1 - axis_joint_2 - axis_joint_3 - axis_joint_4 - axis_joint_5 - axis_joint_6os_controllers.yaml对应配置文件gluon_moveit_controller_manager.launch.xml
<launch> <!--Set the param that trajectory_execution_manager needs to find the controller plugin--> <arg name="moveit_controller_manager" default="moveit_simple_controller_manager/MoveItSimpleControllerManager" /> <param name="moveit_controller_manager" value="$(arg moveit_controller_manager)"/> <!--load controller_list--> <rosparam file="$(find gluon_moveit_config)/config/ros_controllers.yaml"/> </launch>下面是launch文件:
cm_gazebo_bo.launch
<launch> <arg name="paused" default="false"/> <arg name="use_sim_time" default="true"/> <arg name="gui" default="true"/> <arg name="headless" default="false"/> <arg name="debug" default="false"/> <!-- 导入世界 --> <include file="$(find gazebo_ros)/launch/empty_world.launch">] <arg name="debug" value="$(arg debug)" /> <arg name="gui" value="$(arg gui)" /> <arg name="paused" value="$(arg paused)"/> <arg name="use_sim_time" value="$(arg use_sim_time)"/> <arg name="headless" value="$(arg headless)"/> </include> <!-- 导入机械臂 --> <param name="robot_description" textfile="$(find gluon)/urdf/gluon_moveit_sim_pos.urdf" /> <node name="spawn_gazebo_model" pkg="gazebo_ros" type="spawn_model" args="-file $(find gluon)/urdf/gluon_moveit_sim_pos.urdf -urdf -model robot -z 0.25" respawn="false" output="screen" /> <!-- 导入通用文件 --> <include file="$(find gluon_moveit_config)/launch/cm_gazebo_controller_utils.launch"/> <!-- 导入控制器 --> <rosparam file="$(find gluon_moveit_config)/config/gluon_controllers.yaml" command="load"/> <node name="arm_controller_spawner" pkg="controller_manager" type="spawner" respawn="false" output="screen" ns="/gluon" args="gluon_controller"/> </launch>cm_gazebo_controller_utils.launch
<launch> <!-- Robot state publisher --> <node pkg="robot_state_publisher" type="robot_state_publisher" name="robot_state_publisher"> <param name="publish_frequency" type="double" value="50.0" /> <param name="tf_prefix" type="string" value="" /> </node> <!-- Fake Calibration --> <node pkg="rostopic" type="rostopic" name="fake_joint_calibration" args="pub /calibrated std_msgs/Bool true" /> <!-- joint_state_controller --> <rosparam file="$(find gluon_moveit_config)/config/gluon_joint_state_controller.yaml" command="load"/> <node name="joint_controller_spawner" pkg="controller_manager" type="spawner" respawn="false" output="screen" ns="/gluon" args="joint_state_controller" /> </launch>moveit_planning_execution.launch
<launch> <!-- Remap follow_joint_trajectory --> <arg name="sim" default="true" /> <remap if="$(arg sim)" from="/follow_joint_trajectory" to="/gluon_controller/follow_joint_trajectory"/> <include file="$(find gluon_moveit_config)/launch/move_group.launch"> <arg name="publish_monitored_planning_scene" value="true" /> </include> <!--The visualization component of MoveIt!--> <include file="$(find gluon_moveit_config)/launch/moveit_rviz.launch" /> <arg name="config" value="true"/> <arg name="debug" value="false"/> <!-- We do not have a robot connected, so publish fake joint states --> <node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher"> <param name="/use_gui" value="false"/> <rosparam param="/source_list">[/gluon/joint_states]</rosparam> </node> </launch> -
@2297403423
补充:
运行roslaunch gluon_moveit_config cm_gazebo_bo.launch roslaunch gluon_moveit_config moveit_planning_execution.launch文件位置
yaml文件在gluon_moveit_config/config中 launch文件在gluon_moveit_config/launch中 -
@2297403423 解决了,但我不知道该怎么形容这件事情
-
@2297403423
从结果上讲,就是控制器的yaml文件不要有机械臂名字
就像下面,注释掉的方法 达咩

joint_state_controller: type: joint_state_controller/JointStateController publish_rate: 50 # gluon: # joint_state_controller: # type: joint_state_controller/JointStateController # publish_rate: 50gluon_controller: type: position_controllers/JointTrajectoryController joints: - axis_joint_1 - axis_joint_2 - axis_joint_3 - axis_joint_4 - axis_joint_5 - axis_joint_6 下面是注释内容 # gluon: # gluon_controller: # type: position_controllers/JointTrajectoryController # joints: # - axis_joint_1 # - axis_joint_2 # - axis_joint_3 # - axis_joint_4 # - axis_joint_5 # - axis_joint_6同时,launch文件中内容修改如下(简单说,就是去掉ns)
<node name="arm_controller_spawner" pkg="controller_manager" type="spawner" respawn="false" output="screen" args="gluon_controller"/> -
@2297403423
再补充一下,如果你的gazebo中机械臂在轻微抖动,用这句话也可以解决

-
@2297403423
我是怎么想到这种方法的呢,因为我有个ur的包是正常的,所以,抄作业,爽!

-
@2297403423
ros_controller.yaml修改如下controller_list: - name: "" action_ns: follow_joint_trajectory type: FollowJointTrajectory default: true joints: - axis_joint_1 - axis_joint_2 - axis_joint_3 - axis_joint_4 - axis_joint_5 - axis_joint_6