第九章机器人仿真入门第三节《 将启动gazebo和生产fishbot写成launch文件》编写了gazebo.launch.py之后,运行gazebo没有显示机器人,也没有出现报错
-
求助求助!!!!
-
@441755535 在 第九章机器人仿真入门第三节《 将启动gazebo和生产fishbot写成launch文件》编写了gazebo.launch.py之后,运行gazebo没有显示机器人,也没有出现报错 中说:
ModuleNotFoundError: No module named 'rclpy._rclpy_pybind11'
conda 退掉
-
此回复已被删除! -
此回复已被删除! -
@小鱼 退掉conda后gazebo可以加载模型了,但是会报下面的错误
[gazebo-1] [Err] [Plugin.hh:212] Failed to load plugin libgazebo_ros_imu_sensor.so: libgazebo_ros_imu_sensor.so: cannot open shared object file: No such file or directory
[gazebo-1] [Err] [Plugin.hh:212] Failed to load plugin libgazebo_ros_ray_sensor.so: libgazebo_ros_ray_sensor.so: cannot open shared object file: No such file or directory
[gazebo-1] [Err] [Plugin.hh:212] Failed to load plugin libgazebo_ros_diff_drive.so: libgazebo_ros_diff_drive.so: cannot open shared object file: No such file or directory
[spawn_entity.py-2] [INFO] [1681979467.799171068] [spawn_entity]: Spawn status: SpawnEntity: Successfully spawned entity [fishbot]
[gazebo-1] [Err] [Plugin.hh:212] Failed to load plugin libgazebo_ros_joint_state_publisher.so: libgazebo_ros_joint_state_publisher.so: cannot open shared object file: No such file or directory
[INFO] [spawn_entity.py-2]: process has finished cleanly [pid 37915]
[gazebo-1] context mismatch in svga_surface_destroy
[gazebo-1] context mismatch in svga_surface_destroy -
@441755535
urdf代码如下
<?xml version="1.0"?>
<robot name="fishbot"><!-- Robot Footprint -->
<link name="base_footprint"/><joint name="base_joint" type="fixed">
<parent link="base_footprint"/>
<child link="base_link"/>
<origin xyz="0.0 0.0 0.076" rpy="0 0 0"/>
</joint><!-- base link -->
<link name="base_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.10"/>
</geometry>
<material name="blue">
<color rgba="0.1 0.1 1.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.12" radius="0.10"/>
</geometry>
<material name="blue">
<color rgba="0.1 0.1 1.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.0122666" ixy="0" ixz="0" iyy="0.0122666" iyz="0" izz="0.02"/>
</inertial>
</link><!-- laser link -->
<link name="laser_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.02" radius="0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.02" radius="0.02"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.1"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link><!-- laser joint -->
<joint name="laser_joint" type="fixed">
<parent link="base_link" />
<child link="laser_link" />
<origin xyz="0 0 0.075" />
</joint><link name="imu_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<box size="0.02 0.02 0.02"/>
</geometry>
</visual>
<collision>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<box size="0.02 0.02 0.02"/>
</geometry>
</collision>
<inertial>
<mass value="0.1"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link><!-- imu joint -->
<joint name="imu_joint" type="fixed">
<parent link="base_link" />
<child link="imu_link" />
<origin xyz="0 0 0.02" />
</joint><link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link><link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.032"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link><joint name="left_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="left_wheel_link" />
<origin xyz="-0.02 0.10 -0.06" />
<axis xyz="0 1 0" />
</joint><joint name="right_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="right_wheel_link" />
<origin xyz="-0.02 -0.10 -0.06" />
<axis xyz="0 1 0" />
</joint><link name="caster_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<sphere radius="0.016"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<sphere radius="0.016"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.02"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link><joint name="caster_joint" type="fixed">
<parent link="base_link" />
<child link="caster_link" />
<origin xyz="0.06 0.0 -0.076" />
<axis xyz="0 1 0" />
</joint><gazebo reference="caster_link">
<material>Gazebo/Black</material>
</gazebo><gazebo reference="caster_link">
<mu1 value="0.0"/>
<mu2 value="0.0"/>
<kp value="1000000.0" />
<kd value="10.0" />
<!-- <fdir1 value="0 0 1"/> -->
</gazebo><gazebo>
<plugin name='diff_drive' filename='libgazebo_ros_diff_drive.so'>
<ros>
<namespace>/</namespace>
<remapping>cmd_vel:=cmd_vel</remapping>
<remapping>odom:=odom</remapping>
</ros>
<update_rate>30</update_rate>
<!-- wheels -->
<!-- <left_joint>left_wheel_joint</left_joint> -->
<!-- <right_joint>right_wheel_joint</right_joint> -->
<left_joint>left_wheel_joint</left_joint>
<right_joint>right_wheel_joint</right_joint>
<!-- kinematics -->
<wheel_separation>0.2</wheel_separation>
<wheel_diameter>0.065</wheel_diameter>
<!-- limits -->
<max_wheel_torque>20</max_wheel_torque>
<max_wheel_acceleration>1.0</max_wheel_acceleration>
<!-- output -->
<publish_odom>true</publish_odom>
<publish_odom_tf>true</publish_odom_tf>
<publish_wheel_tf>false</publish_wheel_tf>
<odometry_frame>odom</odometry_frame>
<robot_base_frame>base_footprint</robot_base_frame>
</plugin><plugin name="fishbot_joint_state" filename="libgazebo_ros_joint_state_publisher.so"> <ros> <remapping>~/out:=joint_states</remapping> </ros> <update_rate>30</update_rate> <joint_name>right_wheel_joint</joint_name> <joint_name>left_wheel_joint</joint_name> </plugin> </gazebo> <gazebo reference="laser_link"> <material>Gazebo/Black</material> </gazebo> <gazebo reference="imu_link"> <sensor name="imu_sensor" type="imu"> <plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin"> <ros> <namespace>/</namespace> <remapping>~/out:=imu</remapping> </ros> <initial_orientation_as_reference>false</initial_orientation_as_reference> </plugin> <always_on>true</always_on> <update_rate>100</update_rate> <visualize>true</visualize> <imu> <angular_velocity> <x> <noise type="gaussian"> <mean>0.0</mean> <stddev>2e-4</stddev> <bias_mean>0.0000075</bias_mean> <bias_stddev>0.0000008</bias_stddev> </noise> </x> <y> <noise type="gaussian"> <mean>0.0</mean> <stddev>2e-4</stddev> <bias_mean>0.0000075</bias_mean> <bias_stddev>0.0000008</bias_stddev> </noise> </y> <z> <noise type="gaussian"> <mean>0.0</mean> <stddev>2e-4</stddev> <bias_mean>0.0000075</bias_mean> <bias_stddev>0.0000008</bias_stddev> </noise> </z> </angular_velocity> <linear_acceleration> <x> <noise type="gaussian"> <mean>0.0</mean> <stddev>1.7e-2</stddev> <bias_mean>0.1</bias_mean> <bias_stddev>0.001</bias_stddev> </noise> </x> <y> <noise type="gaussian"> <mean>0.0</mean> <stddev>1.7e-2</stddev> <bias_mean>0.1</bias_mean> <bias_stddev>0.001</bias_stddev> </noise> </y> <z> <noise type="gaussian"> <mean>0.0</mean> <stddev>1.7e-2</stddev> <bias_mean>0.1</bias_mean> <bias_stddev>0.001</bias_stddev> </noise> </z> </linear_acceleration> </imu> </sensor> </gazebo> <gazebo reference="laser_link"> <sensor name="laser_sensor" type="ray"> <always_on>true</always_on> <visualize>true</visualize> <update_rate>5</update_rate> <pose>0 0 0.075 0 0 0</pose> <ray> <scan> <horizontal> <samples>360</samples> <resolution>1.000000</resolution> <min_angle>0.000000</min_angle> <max_angle>6.280000</max_angle> </horizontal> </scan> <range> <min>0.120000</min> <max>3.5</max> <resolution>0.015000</resolution> </range> <noise> <type>gaussian</type> <mean>0.0</mean> <stddev>0.01</stddev> </noise> </ray> <plugin name="laserscan" filename="libgazebo_ros_ray_sensor.so"> <ros> <!-- <namespace>/tb3</namespace> --> <remapping>~/out:=scan</remapping> </ros> <output_type>sensor_msgs/LaserScan</output_type> <frame_name>laser_link</frame_name> </plugin> </sensor> </gazebo></robot>
-
解决:把launch中的urdf_name = "fishbot_gazebo.urdf" 改为:urdf_name = "fishbot_base.urdf"
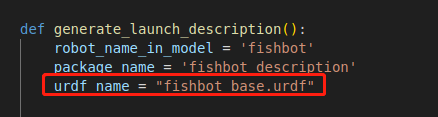
原因:(自己摸索的,不知道对不对,我自己按上面改了之后就能显示了)
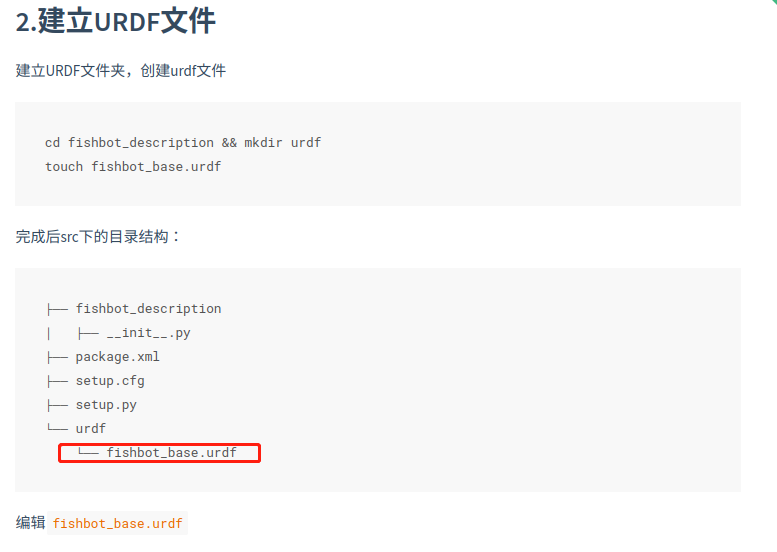
应该是urdf的文件名搞错了,第8章跟着教程建立urdf的文件名是_base结尾的,如下图:
然后现在的launch文件里是_gazebo结尾的:
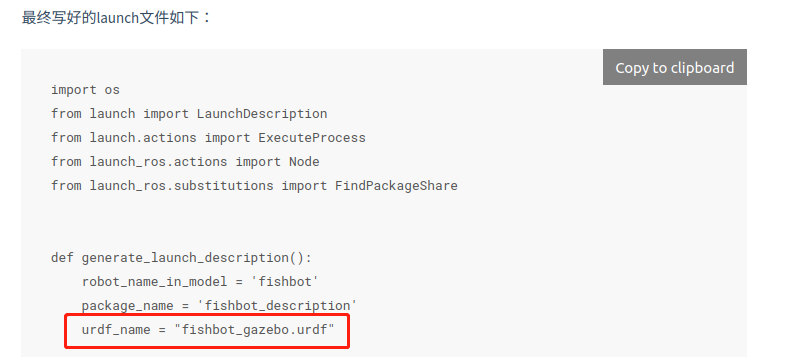
运行就加载不了urdf文件了,报错:

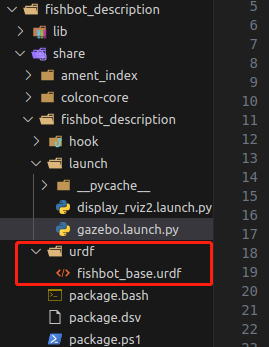
看看这个路径下的urdf文件,并没有fishbot_gazebo.urdf
-
@1094967296 首先确保用rqt显示是没问题的,确保urdf里的内容是对的
-
此回复已被删除! -
@1094967296 牛皮,哥,我找了半天的错没想到是名错了