在Python和ROS2(Robot Operating System 2)的上下文中,pkg 并不是一个标准命令或模块,这可能是导致你遇到错误的原因。在ROS2中,运行节点通常使用 ros2 run 命令,而不是 pkg。以下是一些可能帮助你解决问题的步骤和解释:
1. 确认ROS2环境已正确设置首先,确保你的ROS2环境已经正确安装并设置。这通常包括:
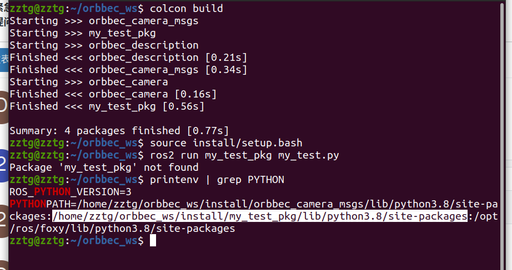
安装ROS2(例如,使用ros2的官方安装脚本或包管理器)。 初始化ROS2工作空间(例如,通过colcon build构建你的工作空间)。 在你的shell中source相应的setup文件(例如,source /opt/ros/<ros2-distribution>/setup.bash 或 source ~/ros2_ws/install/setup.bash)。 2. 使用正确的命令运行ROS2节点假设你已经有一个ROS2包,其中包含一个你想要运行的节点,你应该使用以下命令格式:
ros2 run <package_name> <node_name>例如,如果你的包名是demo_nodes_cpp,并且你想运行其中的talker节点,你应该输入:
ros2 run demo_nodes_cpp talker 3. 检查错误信息如果你在运行ros2 run命令时遇到错误,请仔细检查错误信息。错误信息通常会给出为什么命令失败的具体原因,比如:
包名或节点名拼写错误。 节点依赖的库未正确安装或配置。 ROS2环境变量未正确设置。 4. 查看文档和社区资源如果错误信息不够明确,或者你不确定如何解决遇到的问题,查看ROS2的官方文档或社区论坛可能很有帮助。ROS2有一个活跃的社区,许多常见问题可能已经有人遇到并找到了解决方案。
5. 确认Python环境虽然ros2 run命令本身与Python直接无关(它是ROS2 CLI工具的一部分),但确保你的Python环境(特别是如果你在使用Python节点)已经设置好是很重要的。这包括安装必要的Python包和确保Python解释器的路径正确。
总结如果你看到关于pkg的错误,这很可能是因为你误用了命令或者误解了ROS2的运行机制。请按照上述步骤检查和调整你的设置和命令。如果问题仍然存在,请提供更具体的错误信息以便进一步分析。
以上为生成回答,仅供参考~