colcon build编译问题
-
系统ubuntu 22.04 ROS2 humble
我在进行ROS节点编写时,添加了倍服PLC的通讯库ADS,在进行colcon build时,终端始终输出以下问题,并且查看g++和gcc版本均是11.3.0
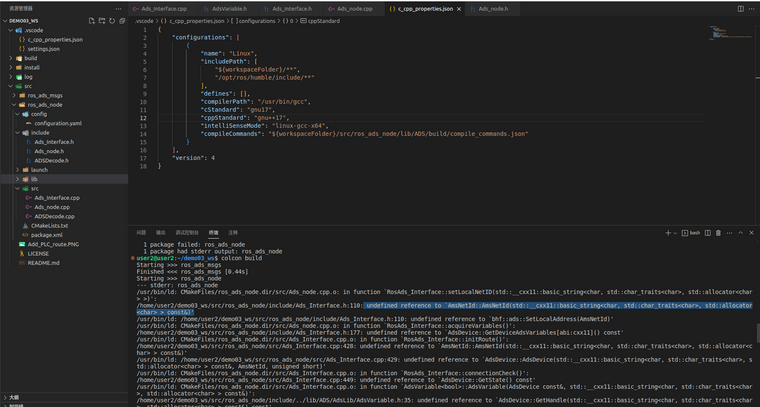
其终端输出如下:Starting >>> ros_ads_msgs Finished <<< ros_ads_msgs [0.44s] Starting >>> ros_ads_node --- stderr: ros_ads_node /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_node.cpp.o: in function `RosAds_Interface::setLocalNetID(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> >)': /home/user2/demo03_ws/src/ros_ads_node/include/Ads_Interface.h:110: undefined reference to `AmsNetId::AmsNetId(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&)' /usr/bin/ld: /home/user2/demo03_ws/src/ros_ads_node/include/Ads_Interface.h:110: undefined reference to `bhf::ads::SetLocalAddress(AmsNetId)' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_node.cpp.o: in function `RosAds_Interface::acquireVariables()': /home/user2/demo03_ws/src/ros_ads_node/include/Ads_Interface.h:177: undefined reference to `AdsDevice::GetDeviceAdsVariables[abi:cxx11]() const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `RosAds_Interface::initRoute()': /home/user2/demo03_ws/src/ros_ads_node/src/Ads_Interface.cpp:428: undefined reference to `AmsNetId::AmsNetId(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&)' /usr/bin/ld: /home/user2/demo03_ws/src/ros_ads_node/src/Ads_Interface.cpp:429: undefined reference to `AdsDevice::AdsDevice(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, AmsNetId, unsigned short)' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `RosAds_Interface::connectionCheck()': /home/user2/demo03_ws/src/ros_ads_node/src/Ads_Interface.cpp:449: undefined reference to `AdsDevice::GetState() const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<bool>::AdsVariable(AdsDevice const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&)': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:35: undefined reference to `AdsDevice::GetHandle(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<unsigned char>::AdsVariable(AdsDevice const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&)': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:35: undefined reference to `AdsDevice::GetHandle(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<signed char>::AdsVariable(AdsDevice const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&)': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:35: undefined reference to `AdsDevice::GetHandle(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<unsigned short>::AdsVariable(AdsDevice const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&)': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:35: undefined reference to `AdsDevice::GetHandle(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<short>::AdsVariable(AdsDevice const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&)': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:35: undefined reference to `AdsDevice::GetHandle(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o:/home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:35: more undefined references to `AdsDevice::GetHandle(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&) const' follow /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<double>::Write(unsigned long, void const*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:93: undefined reference to `AdsDevice::WriteReqEx(unsigned int, unsigned int, unsigned int, void const*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<double>::Read(unsigned long, void*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:80: undefined reference to `AdsDevice::ReadReqEx2(unsigned int, unsigned int, unsigned int, void*, unsigned int*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<float>::Write(unsigned long, void const*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:93: undefined reference to `AdsDevice::WriteReqEx(unsigned int, unsigned int, unsigned int, void const*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<float>::Read(unsigned long, void*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:80: undefined reference to `AdsDevice::ReadReqEx2(unsigned int, unsigned int, unsigned int, void*, unsigned int*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<long>::Write(unsigned long, void const*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:93: undefined reference to `AdsDevice::WriteReqEx(unsigned int, unsigned int, unsigned int, void const*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<long>::Read(unsigned long, void*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:80: undefined reference to `AdsDevice::ReadReqEx2(unsigned int, unsigned int, unsigned int, void*, unsigned int*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<int>::Write(unsigned long, void const*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:93: undefined reference to `AdsDevice::WriteReqEx(unsigned int, unsigned int, unsigned int, void const*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<int>::Read(unsigned long, void*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:80: undefined reference to `AdsDevice::ReadReqEx2(unsigned int, unsigned int, unsigned int, void*, unsigned int*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<unsigned int>::Write(unsigned long, void const*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:93: undefined reference to `AdsDevice::WriteReqEx(unsigned int, unsigned int, unsigned int, void const*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<unsigned int>::Read(unsigned long, void*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:80: undefined reference to `AdsDevice::ReadReqEx2(unsigned int, unsigned int, unsigned int, void*, unsigned int*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<short>::Write(unsigned long, void const*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:93: undefined reference to `AdsDevice::WriteReqEx(unsigned int, unsigned int, unsigned int, void const*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<short>::Read(unsigned long, void*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:80: undefined reference to `AdsDevice::ReadReqEx2(unsigned int, unsigned int, unsigned int, void*, unsigned int*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<unsigned short>::Write(unsigned long, void const*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:93: undefined reference to `AdsDevice::WriteReqEx(unsigned int, unsigned int, unsigned int, void const*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<unsigned short>::Read(unsigned long, void*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:80: undefined reference to `AdsDevice::ReadReqEx2(unsigned int, unsigned int, unsigned int, void*, unsigned int*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<signed char>::Write(unsigned long, void const*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:93: undefined reference to `AdsDevice::WriteReqEx(unsigned int, unsigned int, unsigned int, void const*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<signed char>::Read(unsigned long, void*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:80: undefined reference to `AdsDevice::ReadReqEx2(unsigned int, unsigned int, unsigned int, void*, unsigned int*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<unsigned char>::Write(unsigned long, void const*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:93: undefined reference to `AdsDevice::WriteReqEx(unsigned int, unsigned int, unsigned int, void const*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<unsigned char>::Read(unsigned long, void*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:80: undefined reference to `AdsDevice::ReadReqEx2(unsigned int, unsigned int, unsigned int, void*, unsigned int*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<bool>::Write(unsigned long, void const*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:93: undefined reference to `AdsDevice::WriteReqEx(unsigned int, unsigned int, unsigned int, void const*) const' /usr/bin/ld: CMakeFiles/ros_ads_node.dir/src/Ads_Interface.cpp.o: in function `AdsVariable<bool>::Read(unsigned long, void*) const': /home/user2/demo03_ws/src/ros_ads_node/include/../lib/ADS/AdsLib/AdsVariable.h:80: undefined reference to `AdsDevice::ReadReqEx2(unsigned int, unsigned int, unsigned int, void*, unsigned int*) const' collect2: error: ld returned 1 exit status gmake[2]: *** [CMakeFiles/ros_ads_node.dir/build.make:208:ros_ads_node] 错误 1 gmake[1]: *** [CMakeFiles/Makefile2:154:CMakeFiles/ros_ads_node.dir/all] 错误 2 gmake: *** [Makefile:146:all] 错误 2 --- Failed <<< ros_ads_node [2.28s, exited with code 2] Summary: 1 package finished [2.86s] 1 package failed: ros_ads_node 1 package had stderr output: ros_ads_node有没有大佬帮忙看看怎么解决,很难受,万分感激
-
 Y yudonghou123 删除了该主题于
Y yudonghou123 删除了该主题于
-
Y yudonghou123 恢复了该主题于
-
@yudonghou123 函数其实都存在,但是一直报这个错误
-
@yudonghou123 贴下代码,根据过往经验是代码问题
-
@小鱼 我又重新写了一个节点,也是一样的错误,只要将ADS协议作为依赖包就出现这个,代码如下
#include <memory> #include "rclcpp/rclcpp.hpp" #include "auv_msgs/msg/ctd.hpp" #include "../lib/ADS/AdsLib/AdsLib.h" #include "../lib/ADS/AdsLib/AdsVariable.h" #include "../lib/ADS/AdsLib/AdsNotification.h" using namespace std::chrono_literals; class ctd_sensor_pub : public rclcpp::Node { public: ctd_sensor_pub() : Node("ctd_sensor_publisher") { RCLCPP_INFO(this->get_logger(), "CTD RUNNING"); ctd_publisher_ = this->create_publisher<auv_msgs::msg::CTD>("ctd_data", 100); ctd_timer_ = this->create_wall_timer(0.1s, std::bind(&ctd_sensor_pub::ctd_time_callback, this)); } private: void ctd_time_callback() { static const AmsNetId remoteNetId{192, 168, 0, 2, 1, 1}; static const char remoteIpV4[] = "192.168.0.2"; AdsDevice route{remoteIpV4, remoteNetId, AMSPORT_R0_PLC_TC3}; AdsVariable<float> read1Var{route, "Sensor.TDDataChannel[1]"}; AdsVariable<float> read2Var{route, "Sensor.TDDataChannel[2]"}; auto ctd_data = auv_msgs::msg::CTD(); ctd_data.temperature = read1Var; ctd_data.pressure = read2Var; RCLCPP_INFO(this->get_logger(), "温深仪传送数据为:温度-%f,压力-%f", ctd_data.temperature, ctd_data.pressure); ctd_publisher_->publish(ctd_data); } rclcpp::TimerBase::SharedPtr ctd_timer_; rclcpp::Publisher<auv_msgs::msg::CTD>::SharedPtr ctd_publisher_; }; int main(int argc, char *argv[]) { rclcpp::init(argc, argv); rclcpp::spin(std::make_shared<ctd_sensor_pub>()); rclcpp::shutdown(); return 0; }终端输出为:
Starting >>> auv_msgs Finished <<< auv_msgs [0.56s] Starting >>> auv_localize --- stderr: auv_localize /usr/bin/ld: CMakeFiles/ctd_sensor_pub.dir/src/ctd_sensor_pub.cpp.o: in function `ctd_sensor_pub::ctd_time_callback()': /home/user2/auv533_ws/src/auv_localize/src/ctd_sensor_pub.cpp:24: undefined reference to `AmsNetId::AmsNetId(unsigned char, unsigned char, unsigned char, unsigned char, unsigned char, unsigned char)' /usr/bin/ld: /home/user2/auv533_ws/src/auv_localize/src/ctd_sensor_pub.cpp:27: undefined reference to `AdsDevice::AdsDevice(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&, AmsNetId, unsigned short)' /usr/bin/ld: CMakeFiles/ctd_sensor_pub.dir/src/ctd_sensor_pub.cpp.o: in function `AdsVariable<float>::AdsVariable(AdsDevice const&, std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&)': /home/user2/auv533_ws/src/auv_localize/src/../lib/ADS/AdsLib/AdsVariable.h:15: undefined reference to `AdsDevice::GetHandle(std::__cxx11::basic_string<char, std::char_traits<char>, std::allocator<char> > const&) const' /usr/bin/ld: CMakeFiles/ctd_sensor_pub.dir/src/ctd_sensor_pub.cpp.o: in function `AdsVariable<float>::Read(unsigned long, void*) const': /home/user2/auv533_ws/src/auv_localize/src/../lib/ADS/AdsLib/AdsVariable.h:53: undefined reference to `AdsDevice::ReadReqEx2(unsigned int, unsigned int, unsigned long, void*, unsigned int*) const' collect2: error: ld returned 1 exit status gmake[2]: *** [CMakeFiles/ctd_sensor_pub.dir/build.make:176:ctd_sensor_pub] 错误 1 gmake[1]: *** [CMakeFiles/Makefile2:210:CMakeFiles/ctd_sensor_pub.dir/all] 错误 2 gmake: *** [Makefile:146:all] 错误 2 --- Failed <<< auv_localize [4.10s, exited with code 2] Summary: 1 package finished [4.81s] 1 package failed: auv_localize 1 package had stderr output: auv_localize他的这个PLC的通讯库是在这里:ADS通讯协议
芜湖
-
@小鱼
如果是上面那个程序:
Ads_Interface.h代码为:#ifndef HEADER_H_ADS_INTERFACE #define HEADER_H_ADS_INTERFACE #include <yaml-cpp/yaml.h> #include <cstdlib> #include "../lib/ADS/AdsLib/standalone/AdsDef.h" #include "../lib/ADS/AdsLib/AdsLib.h" #include "../lib/ADS/AdsLib/AdsVariable.h" #include <time.h> #include <boost/thread/thread.hpp> #include <variant> #include <mutex> #include <stdio.h> #include <cstring> using namespace std; class RosAds_Interface { enum{ BOOL, UINT8_T, INT8_T, UINT16_T, INT16_T, UINT32_T, INT32_T, INT64_T, FLOAT, DOUBLE, DATE, }; public : using variant_t = variant<bool, uint8_t, int8_t, uint16_t, int16_t, uint32_t, int32_t, int64_t, float, double, tm>; /** * @brief RosAds_Interface simple consctructor */ RosAds_Interface(); ~RosAds_Interface(); /** * @brief adsWriteValue writes on a single variable * @param name name of the variable to write on * @param value value of the variable to write on * @return true if the writing succeded * @return false otherwise */ bool adsWriteValue(string name, variant_t value); /** * @brief adsReadValue reads a single variable's value * @param varname name of the variable to read * @return variant_t value of the variable */ variant_t adsReadValue(string varname); /** * @brief adsReadVariables reads multiple variables' value * @param varnames names of the variables to read * @return vector<variant_t> values of the variables */ vector<variant_t> adsReadVariables(vector<string> varnames); /** * @brief factory (re)-create an IADS variable * @param varname the alias of the variable to (re)-create * @return true if the creation succeeded */ bool factory(string varname); /** * @brief convert_type_from_string gets the type from a string * @param type the type as string * @return the type as int * @return -1 if not a type */ int convert_type_from_string(string type); /** * @brief setRemoteNetID set the remote NetID * @param netId netID to set as string of type: xxx.xxx.xxx.xxx.xxx.xxx */ void setRemoteNetID(string netId){m_remoteNetId = netId;} /** * @brief getRemoteNetID get the remote NetID * @return netId netID parameter */ string getRemoteNetID(){return m_remoteNetId;} /** * @brief setRemoteIPV4 set the remoteIPV4 * @param address IPV4 to set as string of type: xxx.xxx.xxx.xxx */ void setRemoteIPV4(string address){m_remoteIpV4 = address;} /** * @brief getRemoteIPV4 get the remote IPV4 * @return IPV4 IPV4 parameter */ string getRemoteIPV4(){return m_remoteIpV4;} /** * @brief setLocalNetID set the local NetID * @param netId netID to set as string of type: xxx.xxx.xxx.xxx.xxx.xxx */ void setLocalNetID(string netId){m_localNetId_param = netId; AdsSetLocalAddress(AmsNetId(m_localNetId_param));} /** * @brief getLocalNetID get the local NetID * @return netId netID parameter */ string getLocalNetID(){return m_localNetId_param;} /** * @brief getVariablesMap * @return a copy of the variables memory */ map<string, pair<string, variant_t>> getVariablesMap(){return m_variables_map;} /** * @brief updateMemory update the variables memory */ void updateMemory(); /** * @brief initRoute initialize a connection to the ADS device */ void initRoute(); /** * @brief connectionCheck * * Tries to get ADS state * If the ADS is not running setsm_device state to false, to true otherwise * If the ADS is not running or connection failed, tries to establish a new connection * If connection was down and is up again, recreates all IADS variables (get the new handles) * * @return ads state */ int connectionCheck(); /** * @brief getState * @return true if data published are valid * @return false otherwise */ bool getState(){return(m_device_state);} /** * @brief getADSState * @return return current ADS state */ int getADSState(){return(m_ads_state);} /** * @brief bindPLcVar creates IADS variables for aliased variables given in configuration file * @return true if aliasing succeeded * @return false otherwise */ bool bindPLcVar(); /** * @brief checkVariableType * @param varname the name of the variable to check the type of * @return the type of the variable as int * @return -1 if variable does not exist */ int checkVariableType(string varname); /** * @brief acquireVariables get all ADS variables from the device */ void acquireVariables(){m_VariableADS = m_route->GetDeviceAdsVariables();} /*GetDeviceAdsVariables();}*/ /** * @brief setName set the name of the device for configuration * @param name the name of the device */ void setName(string name){m_name = name;} /** * @brief setFile set the configuration file the device is configured from * @param config_file the full path to the YAML configuration file */ void setFile(string config_file){m_config_file = config_file;} private: string m_remoteNetId; /*!< the NetID of the ADS device */ string m_remoteIpV4; /*!< the IPV4 of the ADS device */ string m_localNetId_param; /*!< the local net ID */ double m_temp; /*!< a temp value for reading a variable value */ string m_name; /*!< the name of the device for configuration */ string m_config_file; /*!< the configuration file to use */ int m_ads_state; /*!< the last known state of ADS */ AmsNetId* m_AmsNetIdremoteNetId; /*!< the NetID structure of the ADS device */ AdsDevice* m_route; /*!< the ADS device route */ bool m_device_state{true}; /*!< the last known validity state of the values */ //Mutex utile pour la communication mutex m_ComMutex; /*!< Communication mutex */ mutex m_MemMutex; /*!< memory mutex */ map<string,string> m_VariableADS; /*!< a map with ADS name as key and the variable type as value */ map<string,string> m_Alias_map; /*!< a map with alias name as key and ADS names as value */ map<string,pair<int, string>> m_VariableMapping; /*!< a map with alias name as key and both representation of it's type a value */ map<string,IAdsVariable*> m_RouteMapping; /*!< a map with alias name as key and the IADS variable as value */ map<string, pair<string, variant_t>> m_variables_map; /*!< a map with alias name as key and a pair with the type of the variable as string and it's value in it's own type */ }; #endifAds_Interface.cpp代码为:
#include "Ads_Interface.h" using namespace std; /** * @brief RosAds_Interface simple consctructor */ RosAds_Interface::RosAds_Interface() { } RosAds_Interface::~RosAds_Interface() { if(m_route) { delete m_route; } if(m_AmsNetIdremoteNetId) { delete m_AmsNetIdremoteNetId; } for(map<string,IAdsVariable*>::iterator it = m_RouteMapping.begin(); it != m_RouteMapping.end(); ++it) { delete it->second; } } /** * @brief adsWriteValue writes on a single variable * @param name name of the variable to write on * @param value value of the variable to write on * @return true if the writing succeded * @return false otherwise */ bool RosAds_Interface::adsWriteValue(string name, variant_t value){ int varType = checkVariableType(name); bool dataCorrect = true; bool bresult = true; auto no_issue = true; if( m_VariableMapping.find(name) == m_VariableMapping.end()){ dataCorrect = false; bresult = false; } else if (m_VariableMapping[name].first == varType && m_device_state) { m_ComMutex.lock(); m_MemMutex.lock(); try { switch(m_VariableMapping[name].first) { case BOOL: { *m_RouteMapping[name] = get<bool>(value); break; } case UINT8_T: { *m_RouteMapping[name] = get<uint8_t>(value); break; } case INT8_T: { *m_RouteMapping[name] = get<int8_t>(value); break; } case UINT16_T: { *m_RouteMapping[name] = get<uint16_t>(value); break; } case INT16_T: { *m_RouteMapping[name] = get<int16_t>(value); break; } case UINT32_T: { *m_RouteMapping[name] = get<uint32_t>(value); break; } case INT32_T: { *m_RouteMapping[name] = get<int32_t>(value); break; } case INT64_T: { *m_RouteMapping[name] = get<int64_t>(value); break; } case FLOAT: { *m_RouteMapping[name] = get<float>(value); break; } case DOUBLE: { *m_RouteMapping[name] = get<double>(value); break; } case DATE: { tm temp = get<tm>(value); *m_RouteMapping[name] = mktime(&temp); break; } default: { no_issue = false; } } } catch(AdsException e) { no_issue = false; } m_MemMutex.unlock(); m_ComMutex.unlock(); } else { factory(name); } if(!no_issue){ factory(name); } if(!dataCorrect) { bresult = false; } return bresult; } /** * @brief adsReadValue reads a single variable's value * @param varName name of the variable to read * @return variant_t value of the variable */ RosAds_Interface::variant_t RosAds_Interface::adsReadValue(string name) { variant_t result; if(m_RouteMapping.find(name) != m_RouteMapping.end()) { auto no_issue = true; m_ComMutex.lock(); m_MemMutex.lock(); if(m_device_state) { try { if(m_RouteMapping[name]) { m_RouteMapping[name]->ReadValue(&m_temp); switch(m_VariableMapping[name].first) { case BOOL: { result =(bool)m_temp; break; } case UINT8_T: { result = (uint8_t)m_temp; break; } case INT8_T: { result = (int8_t)m_temp; break; } case UINT16_T: { result = (uint16_t)m_temp; break; } case INT16_T: { result = (int16_t)m_temp; break; } case UINT32_T: { result = (uint32_t)m_temp; break; } case INT32_T: { result = (int32_t)m_temp; break; } case INT64_T: { result = (int64_t)m_temp; break; } case FLOAT: { result = (float)m_temp; break; } case DOUBLE: { result = (double)m_temp; break; } case DATE: { result = (uint32_t)m_temp; break; } default: { } } } else { no_issue = false; } } catch(...) { no_issue = false; } } m_MemMutex.unlock(); m_ComMutex.unlock(); if(!no_issue) { factory(name); } } return result; } /** * @brief adsReadVariables reads multiple variables' value * @param varNames names of the variables to read * @return vector<variant_t> values of the variables */ vector<RosAds_Interface::variant_t> RosAds_Interface::adsReadVariables(vector<string> varNames) { vector<variant_t> result; for (auto& name: varNames) { result.push_back(adsReadValue(name)); } return result; } /** * @brief factory (re)-create an IADS variable * @param varName the alias of the variable to (re)-create * @return true if the creation succeeded */ bool RosAds_Interface::factory(string varName) { bool result = false; auto no_issue = true; m_MemMutex.lock(); try { string type = m_VariableADS[m_Alias_map[varName]]; do{ if(m_RouteMapping[varName]) { delete m_RouteMapping[varName]; } if(type == "BOOL"){ m_RouteMapping[varName] = new AdsVariable<bool>(*m_route, m_Alias_map[varName]); result = true; break; } if(type == "BYTE" || type == "USINT"){ m_RouteMapping[varName] = new AdsVariable<uint8_t>(*m_route, m_Alias_map[varName]); result = true; break; } if(type == "SINT"){ m_RouteMapping[varName] = new AdsVariable<int8_t>(*m_route, m_Alias_map[varName]); result = true; break; } if(type == "WORD" || type == "UINT"){ m_RouteMapping[varName] = new AdsVariable<uint16_t>(*m_route, m_Alias_map[varName]); result = true; break; } if(type == "INT"){ m_RouteMapping[varName] = new AdsVariable<int16_t>(*m_route, m_Alias_map[varName]); result = true; break; } if(type == "DWORD" || type == "UDINT" || type == "DATE" || type == "TIME" || type == "TIME_OF_DAY" || type == "LTIME"){ m_RouteMapping[varName] = new AdsVariable<uint32_t>(*m_route, m_Alias_map[varName]); result = true; break; } if(type == "DINT"){ m_RouteMapping[varName] = new AdsVariable<int32_t>(*m_route, m_Alias_map[varName]); result = true; break; } if(type == "LINT"){ m_RouteMapping[varName] = new AdsVariable<int64_t>(*m_route, m_Alias_map[varName]); result = true; break; } if(type == "REAL"){ m_RouteMapping[varName] = new AdsVariable<float>(*m_route, m_Alias_map[varName]); result = true; break; } if(type == "LREAL"){ m_RouteMapping[varName] = new AdsVariable<double>(*m_route, m_Alias_map[varName]); result = true; break; } } while(false); } catch (...) { no_issue = false; } m_MemMutex.unlock(); if(!no_issue){ m_ads_state = false; connectionCheck(); } return result; } /** * @brief convert_type_from_string gets the type from a string * @param type the type as string * @return the type as int * @return -1 if not a type */ int RosAds_Interface::convert_type_from_string(string type) { int result = -1; do { if(type == "BOOL") { result = BOOL; break; } if(type == "BYTE" || type == "USINT") { result = UINT8_T; break; } if(type == "SINT") { result = INT8_T; break; } if(type == "WORD" || type == "UINT") { result = UINT16_T; break; } if(type == "INT") { result = INT16_T; break; } if(type == "DWORD" || type == "UDINT") { result = UINT32_T; break; } if(type == "DINT") { result = INT32_T; break; } if(type == "LINT") { result = INT64_T; break; } if(type == "REAL") { result = FLOAT; break; } if(type == "LREAL") { result = DOUBLE; break; } if(type == "DATE") { result = DATE; break; } } while(false); return result; } /** * @brief updateMemory update the variables memory */ void RosAds_Interface::updateMemory() { for(auto &[name, pair]: m_variables_map) { pair.second = adsReadValue(name); } } /** * @brief initRoute initialize a connection to the ADS device */ void RosAds_Interface::initRoute() { m_AmsNetIdremoteNetId= new AmsNetId(m_remoteNetId); m_route = new AdsDevice(m_remoteIpV4.c_str(),*m_AmsNetIdremoteNetId, AMSPORT_R0_PLC_TC3); } /** * @brief connectionCheck * * Tries to get ADS state * If the ADS is not running setsm_device state to false, to true otherwise * If the ADS is not running or connection failed, tries to establish a new connection * If connection was down and is up again, recreates all IADS variables (get the new handles) * * @return ads state */ int RosAds_Interface::connectionCheck() { auto result = false; AdsDeviceState test; auto temp_state = m_device_state; m_ComMutex.lock(); try { test = m_route->GetState(); result = (test.ads == ADSSTATE_RUN); m_ads_state = (uint16_t)test.ads; } catch (...) { m_ads_state = ADSSTATE_INVALID; } if (!result) //recovery { if(m_route) { delete m_route; } if(m_AmsNetIdremoteNetId) { delete m_AmsNetIdremoteNetId; } initRoute(); } m_ComMutex.unlock(); if(result && !temp_state) //recreate ADSVariables if connexion is re-established { acquireVariables(); for(auto &[name, alias]: m_VariableMapping) { factory(name); } } m_device_state = result; return (int)test.ads; } /** * @brief bindPLcVar creates IADS variables for aliased variables given in configuration file * @return true if aliasing succeeded * @return false otherwise */ bool RosAds_Interface::bindPLcVar() { bool bresult = false; YAML::Node config = YAML::LoadFile(m_config_file); if (config[m_name]) { //Read each alias with corresponding ADS name for(YAML::const_iterator element=config[m_name]["variables"].begin();element!=config[m_name]["variables"].end();++element) { string adsName = element->first.as<string>(); string alias = element->second.as<string>(); //Check if ADS name is part of downloaded PLC ADS list if ( m_VariableADS.find(adsName) == m_VariableADS.end() ) { continue; } string type = m_VariableADS[adsName]; m_VariableMapping[alias] = pair<int, string>(convert_type_from_string(type), type); m_variables_map[alias] = pair<string, variant_t>(type, variant_t()); m_Alias_map[alias] = adsName; factory(alias); } bresult = true; } else { } return bresult; } /** * @brief checkVariableType * @param varName the name of the variable to check the type of * @return the type of the variable as int * @return -1 if variable does not exist */ int RosAds_Interface::checkVariableType(string varName){ int varType = -1; map<string,pair<int, string>>::iterator it; it= m_VariableMapping.find(varName); if(it != m_VariableMapping.end()) { varType = it->second.first; } return varType; }他其中依赖包的AdsVariable.h代码为:
// SPDX-License-Identifier: MIT /** Copyright (c) 2020 - 2022 Beckhoff Automation GmbH & Co. KG */ #pragma once #include "AdsDevice.h" #include "cstring" struct IAdsVariable { virtual void operator=(const bool& value){} virtual void operator=(const uint8_t& value){} virtual void operator=(const int8_t& value){} virtual void operator=(const uint16_t& value){} virtual void operator=(const int16_t& value){} virtual void operator=(const uint32_t& value){} virtual void operator=(const int32_t& value){} virtual void operator=(const uint64_t& value){} virtual void operator=(const int64_t& value){} virtual void operator=(const float& value){} virtual void operator=(const double& value){} virtual void ReadValue(void *res){} virtual ~IAdsVariable(){} }; template<typename T> struct AdsVariable : public IAdsVariable{ AdsVariable(const AdsDevice& route, const std::string& symbolName) : m_Route(route), m_IndexGroup(ADSIGRP_SYM_VALBYHND), m_Handle(route.GetHandle(symbolName)) {} AdsVariable(const AdsDevice& route, const uint32_t group, const uint32_t offset) : m_Route(route), m_IndexGroup(group), m_Handle(route.GetHandle(offset)) {} operator T() const { T buffer; Read(sizeof(buffer), &buffer); return buffer; } void ReadValue(void *res) override { T buffer; Read(sizeof(buffer), &buffer); memcpy(res, &buffer, sizeof(T)); } void operator=(const T& value) override { Write(sizeof(T), &value); } template<typename U, size_t N> operator std::array<U, N>() const { std::array<U, N> buffer; Read(sizeof(U) * N, buffer.data()); return buffer; } template<typename U, size_t N> void operator=(const std::array<U, N>& value) const { Write(sizeof(U) * N, value.data()); } void Read(const size_t size, void* data) const { uint32_t bytesRead = 0; auto error = m_Route.ReadReqEx2(m_IndexGroup, *m_Handle, size, data, &bytesRead); if (error || (size != bytesRead)) { throw AdsException(error); } } void Write(const size_t size, const void* data) const { auto error = m_Route.WriteReqEx(m_IndexGroup, *m_Handle, size, data); if (error) { throw AdsException(error); } } private: const AdsDevice& m_Route; const uint32_t m_IndexGroup; const AdsHandle m_Handle; };代码有点多,已经困扰我好几天了,我原先以为gcc和G++的版本导致的,但是我看了看gcc和g++的版本都是11.3一样的,我用的这个倍服的PLC提供的通讯库和我ROS2结合的时候感觉问题好多,万分感激
-
@yudonghou123 在 colcon build编译问题 中说:
#include "../lib/ADS/AdsLib/AdsLib.h"
#include "../lib/ADS/AdsLib/AdsVariable.h"
#include "../lib/ADS/AdsLib/AdsNotification.h"把前面的..去掉,修改CmakeLists.txt 将lib文件夹添加进去,然后
#include "ADS/AdsLib/AdsNotification.h"引用 -
@小鱼 好的,大佬,我通过add_subdirectory(lib/ADS/AdsLib)添加好像不管用
cmake_minimum_required(VERSION 3.8) project(auv_localize) if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang") add_compile_options(-Wall -Wextra -Wpedantic) endif() find_package(Threads REQUIRED) set(CMAKE_BUILD_TYPE debug) add_subdirectory(lib/ADS/AdsLib) find_package(ament_cmake REQUIRED) find_package(rclcpp REQUIRED) find_package(auv_msgs REQUIRED) find_package(geometry_msgs REQUIRED) find_package(std_msgs REQUIRED) find_package(message_filters REQUIRED) add_executable(localize_sensor_info_pub src/localize_sensor_info_pub.cpp) target_include_directories(localize_sensor_info_pub PUBLIC $<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include> $<INSTALL_INTERFACE:include>) target_compile_features(localize_sensor_info_pub PUBLIC c_std_99 cxx_std_17) # Require C99 and C++17 ament_target_dependencies( localize_sensor_info_pub "rclcpp" "std_msgs" "auv_msgs" ) add_executable(sensor_info_sub src/sensor_info_sub.cpp) target_include_directories(sensor_info_sub PUBLIC $<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include> $<INSTALL_INTERFACE:include>) target_compile_features(sensor_info_sub PUBLIC c_std_99 cxx_std_17) # Require C99 and C++17 ament_target_dependencies( sensor_info_sub "rclcpp" "std_msgs" "auv_msgs" "message_filters" ) add_executable(ctd_sensor_pub src/ctd_sensor_pub.cpp) target_include_directories(ctd_sensor_pub PUBLIC $<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include> $<INSTALL_INTERFACE:include>) target_compile_features(ctd_sensor_pub PUBLIC c_std_99 cxx_std_17) # Require C99 and C++17 ament_target_dependencies( ctd_sensor_pub "rclcpp" "std_msgs" "auv_msgs" "message_filters" ) install(TARGETS localize_sensor_info_pub ctd_sensor_pub DESTINATION lib/${PROJECT_NAME}) install(TARGETS ctd_sensor_pub ARCHIVE DESTINATION lib LIBRARY DESTINATION lib RUNTIME DESTINATION lib/${PROJECT_NAME}) #install(DIRECTORY # config # DESTINATION share/${PROJECT_NAME}/) if(BUILD_TESTING) find_package(ament_lint_auto REQUIRED) # the following line skips the linter which checks for copyrights # comment the line when a copyright and license is added to all source files set(ament_cmake_copyright_FOUND TRUE) # the following line skips cpplint (only works in a git repo) # comment the line when this package is in a git repo and when # a copyright and license is added to all source files set(ament_cmake_cpplint_FOUND TRUE) ament_lint_auto_find_test_dependencies() endif() ament_package() -
@小鱼 成功了,多谢大佬,需要在cmakelist文件里添加一个add_dependencies(ros_ads_node ads)以及添加一个target_link_libraries,cmakelist文件如下:
cmake_minimum_required(VERSION 3.8) project(auv_localize) if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang") add_compile_options(-Wall -Wextra -Wpedantic) endif() set(THREADS_PREFER_PTHREAD_FLAG ON) find_package(Threads REQUIRED) set(CMAKE_BUILD_TYPE debug) add_subdirectory(lib/ADS/AdsLib) find_package(ament_cmake REQUIRED) find_package(rclcpp REQUIRED) find_package(auv_msgs REQUIRED) find_package(geometry_msgs REQUIRED) find_package(std_msgs REQUIRED) find_package(message_filters REQUIRED) add_executable(localize_sensor_info_pub src/localize_sensor_info_pub.cpp) target_include_directories(localize_sensor_info_pub PUBLIC $<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include> $<INSTALL_INTERFACE:include>) target_compile_features(localize_sensor_info_pub PUBLIC c_std_99 cxx_std_17) # Require C99 and C++17 ament_target_dependencies( localize_sensor_info_pub "rclcpp" "std_msgs" "auv_msgs" ) add_executable(sensor_info_sub src/sensor_info_sub.cpp) target_include_directories(sensor_info_sub PUBLIC $<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include> $<INSTALL_INTERFACE:include>) target_compile_features(sensor_info_sub PUBLIC c_std_99 cxx_std_17) # Require C99 and C++17 ament_target_dependencies( sensor_info_sub "rclcpp" "std_msgs" "auv_msgs" "message_filters" ) add_executable(ctd_sensor_pub src/ctd_sensor_pub.cpp) add_dependencies(ctd_sensor_pub ads) target_compile_features(ctd_sensor_pub PUBLIC c_std_99 cxx_std_17) # Require C99 and C++17 ament_target_dependencies( ctd_sensor_pub "rclcpp" "std_msgs" "auv_msgs" "message_filters" ) target_include_directories(ctd_sensor_pub PUBLIC $<BUILD_INTERFACE:${CMAKE_CURRENT_SOURCE_DIR}/include> $<INSTALL_INTERFACE:include>) target_link_libraries(ctd_sensor_pub ${ament_LIBRARIES} ads -lpthread) install(TARGETS localize_sensor_info_pub ctd_sensor_pub DESTINATION lib/${PROJECT_NAME}) install(TARGETS ctd_sensor_pub ARCHIVE DESTINATION lib LIBRARY DESTINATION lib RUNTIME DESTINATION lib/${PROJECT_NAME}) #install(DIRECTORY # config # DESTINATION share/${PROJECT_NAME}/) if(BUILD_TESTING) find_package(ament_lint_auto REQUIRED) # the following line skips the linter which checks for copyrights # comment the line when a copyright and license is added to all source files set(ament_cmake_copyright_FOUND TRUE) # the following line skips cpplint (only works in a git repo) # comment the line when this package is in a git repo and when # a copyright and license is added to all source files set(ament_cmake_cpplint_FOUND TRUE) ament_lint_auto_find_test_dependencies() endif() ament_package()终于编译成功了,多谢大佬,但是大佬,我在ros2 run这个节点时出现这样一个问题:
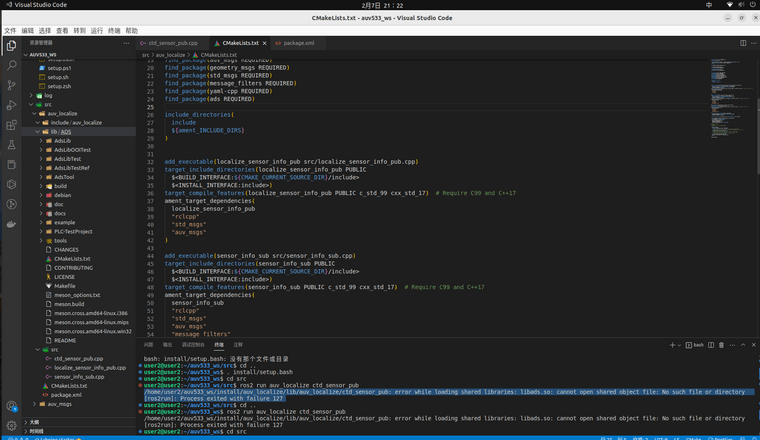
ros2 run auv_localize ctd_sensor_pub终端输出:
/home/user2/auv533_ws/install/auv_localize/lib/auv_localize/ctd_sensor_pub: error while loading shared libraries: libads.so: cannot open shared object file: No such file or directory [ros2run]: Process exited with failure 127希望大佬提醒一下,万分感激
芜湖
-
Y yudonghou123 将这个主题标记为已解决,在
-
Y yudonghou123 将这个主题标记为未解决,在
-
@小鱼 大佬,在编译时出现这样的问题了
/home/user2/auv533_ws/install/auv_localize/lib/auv_localize/ctd_sensor_pub: error while loading shared libraries: libads.so: cannot open shared object file: No such file or directory [ros2run]: Process exited with failure 127我以为是依赖不在路径上,所以我在bashrc上添加这个lib的路径:
export LD_LIBRARY_PATH=/home/user2/auv533_ws/src/auv_localize/lib:$LD_LIBRARY_PATH程序的结构如下:
在lib文件夹里编译了ADS的PLC通讯包,结果显示这个包不存在,难道不是依赖包文件的路径问题吗?还是说我cmakelist文件(代码在上面的聊天里)缺少一个配置,我看github上关于其都是在src路径下建立一个lib文件,然后将ADS通讯库放入进行编译,但是到我这里就出现这样的问题了,请大佬提醒一下,万分感激 -
@yudonghou123 在 colcon build编译问题 中说:
/home/user2/auv533_ws/install/auv_localize/lib/auv_localize/ctd_sensor_pub
ldd /home/user2/auv533_ws/install/auv_localize/lib/auv_localize/ctd_sensor_pub 看一下,是不是那个ads库没link上,这个库是静态库还是动态库还是源码引入的
-
@小鱼 在 colcon build编译问题 中说:
ldd /home/user2/auv533_ws/install/auv_localize/lib/auv_localize/ctd_sensor_pub
通过您提供的命令查找结果如下:
linux-vdso.so.1 (0x00007ffeb5ad1000) libauv_msgs__rosidl_typesupport_cpp.so => not found libads.so => not found librclcpp.so => /opt/ros/humble/lib/librclcpp.so (0x00007f21a8c1e000) librcl.so => /opt/ros/humble/lib/librcl.so (0x00007f21a8bde000) librmw.so => /opt/ros/humble/lib/librmw.so (0x00007f21a8bd2000) libtracetools.so => /opt/ros/humble/lib/libtracetools.so (0x00007f21a8bcd000) librcutils.so => /opt/ros/humble/lib/librcutils.so (0x00007f21a8bb5000) libstdc++.so.6 => /lib/x86_64-linux-gnu/libstdc++.so.6 (0x00007f21a898b000) libgcc_s.so.1 => /lib/x86_64-linux-gnu/libgcc_s.so.1 (0x00007f21a896b000) libc.so.6 => /lib/x86_64-linux-gnu/libc.so.6 (0x00007f21a8741000) liblibstatistics_collector.so => /opt/ros/humble/lib/liblibstatistics_collector.so (0x00007f21a873a000) librcl_interfaces__rosidl_typesupport_cpp.so => /opt/ros/humble/lib/librcl_interfaces__rosidl_typesupport_cpp.so (0x00007f21a872f000) librcl_yaml_param_parser.so => /opt/ros/humble/lib/librcl_yaml_param_parser.so (0x00007f21a8723000) librosgraph_msgs__rosidl_typesupport_cpp.so => /opt/ros/humble/lib/librosgraph_msgs__rosidl_typesupport_cpp.so (0x00007f21a871e000) libstatistics_msgs__rosidl_typesupport_cpp.so => /opt/ros/humble/lib/libstatistics_msgs__rosidl_typesupport_cpp.so (0x00007f21a8719000) librmw_implementation.so => /opt/ros/humble/lib/librmw_implementation.so (0x00007f21a870a000) libament_index_cpp.so => /opt/ros/humble/lib/libament_index_cpp.so (0x00007f21a86ff000) librcl_logging_interface.so => /opt/ros/humble/lib/librcl_logging_interface.so (0x00007f21a86fa000) librcpputils.so => /opt/ros/humble/lib/librcpputils.so (0x00007f21a86ec000) libm.so.6 => /lib/x86_64-linux-gnu/libm.so.6 (0x00007f21a8605000) /lib64/ld-linux-x86-64.so.2 (0x00007f21a8e94000) librcl_logging_spdlog.so => /opt/ros/humble/lib/librcl_logging_spdlog.so (0x00007f21a85fe000) librcl_interfaces__rosidl_typesupport_c.so => /opt/ros/humble/lib/librcl_interfaces__rosidl_typesupport_c.so (0x00007f21a85f3000) librcl_interfaces__rosidl_generator_c.so => /opt/ros/humble/lib/librcl_interfaces__rosidl_generator_c.so (0x00007f21a85d7000) librosidl_runtime_c.so => /opt/ros/humble/lib/librosidl_runtime_c.so (0x00007f21a85cc000) librosidl_typesupport_cpp.so => /opt/ros/humble/lib/librosidl_typesupport_cpp.so (0x00007f21a85c6000) libyaml.so => /opt/ros/humble/lib/libyaml.so (0x00007f21a85a4000) libspdlog.so.1 => /lib/x86_64-linux-gnu/libspdlog.so.1 (0x00007f21a8527000) librosidl_typesupport_c.so => /opt/ros/humble/lib/librosidl_typesupport_c.so (0x00007f21a8521000) libbuiltin_interfaces__rosidl_generator_c.so => /opt/ros/humble/lib/libbuiltin_interfaces__rosidl_generator_c.so (0x00007f21a851c000) libfmt.so.8 => /lib/x86_64-linux-gnu/libfmt.so.8 (0x00007f21a84fb000)我觉得是通过源码引入的,因为我在github上下载了这个ADS库,然后在src文件夹中建立了一个lib文件夹,将其放入了
-
@小鱼 在 colcon build编译问题 中说:
ldd /home/user2/auv533_ws/install/auv_localize/lib/auv_localize/ctd_sensor_pub
成功了,我在创建新的节点时忘记首先对通讯库进行编译了,人麻了,多谢大佬的指点,万分感激
-
Y yudonghou123 将这个主题标记为已解决,在