moveit控制真实机械臂报错
-
错误信息1:
[ WARN] [1676456964.123995048]: Waiting for arm_controller/follow_joint_trajectory to come up
[ INFO] [1676456967.948962794]: Failed to call service get_planning_scene, have you launched move_group or called psm.providePlanningSceneService()?
[ INFO] [1676456967.949335648]: Constructing new MoveGroup connection for group 'arm' in namespace ''
[ WARN] [1676456970.124373334]: Waiting for arm_controller/follow_joint_trajectory to come up
[ERROR] [1676456976.124754349]: Action client not connected: arm_controller/follow_joint_trajectory错误信息2:
[ERROR] [1676456988.700318365]: Unable to identify any set of controllers that can actuate the specified joints: [ joint1 joint2 joint2claw_r joint3 joint4 joint5 ]
[ERROR] [1676456988.700346910]: Known controllers and their joints:[ERROR] [1676456988.700380093]: Apparently trajectory initialization failed
下面是错误图片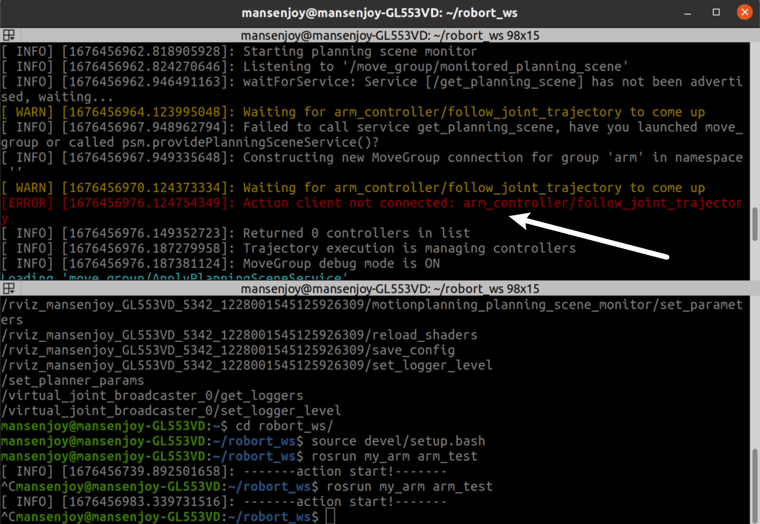
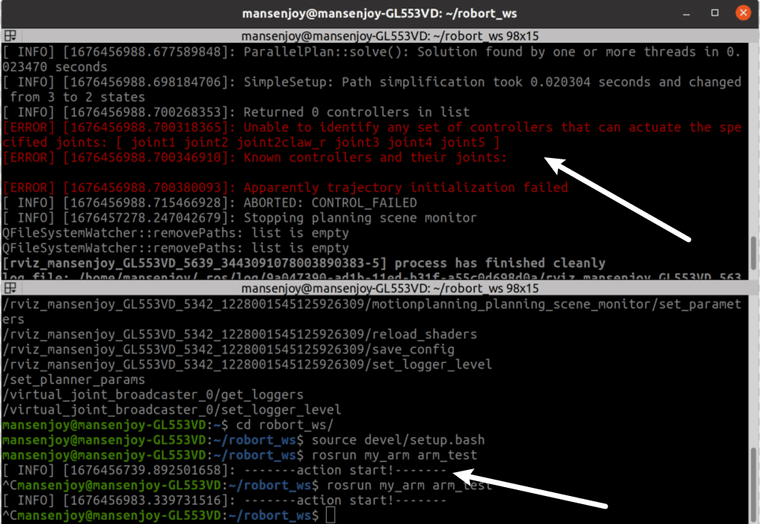
求教解决感谢 -
这个用Moviet2控制真是机械臂该改哪些地方,怎么改阿