MicroROS没有数据显示,无法用键盘操控FishBot的可能解决方案
-
回复: [FishBot教程]4.使用ROS2键盘控制FishBot
@andrew_liumuran 在 [FishBot教程]4.使用ROS2键盘控制FishBot 中说:
@小鱼
多次尝试后仍然无法正常接入小车,运行指令只显示前两行xxx@ros2:~$ docker run -it --rm -v /dev:/dev -v /dev/shm:/dev/shm --privileged --net=host microros/micro-ros-agent:$ROS_DISTRO udp4 --port 8888 -v6 [1674702302.740615] info | UDPv4AgentLinux.cpp | init | running... | port: 8888 [1674702302.741072] info | Root.cpp | set_verbose_level | logger setup | verbose_level: 6重新用配置注说配置小车,重启虚拟机和小车后仍均无法接入,只有前两行。
请问可能是哪里出现了问题,如何解决,谢谢!@小鱼 在 [FishBot教程]4.使用ROS2键盘控制FishBot 中说:
@andrew_liumuran 第三节有问题,没有配置成功
https://fishros.org.cn/forum/topic/936
- 确认小车有正常接入wifi,可以看屏幕上的WIFI状态
- 确认小车的IP地址是否可以ping通,可以看屏幕确认小车IP
另外注意:目前仅支持2.4Gwifi,确认下WIFI的主频,如何是二合一的,请分开。
如果是台式机请尽量使用网线连接路由器,如果是笔记本,最好直接笔记本开热点给小车直接接入。如果是虚拟机,请确定虚拟机的IP地址是局域网IP,也就是说虚拟机网络处于桥接状态。
问题一种可能的成功解决方法:
在确保小车跟电脑虚拟机在相同子网,且小车可以ping通时,若仍出现MicroROS只显示前两行,且用电脑不能控制小车,可以重新配置server_ip
@小鱼 在 [FishBot教程] 3. 主控板固件烧录与配置 中说:
3.2 配置MicroROS服务
机器人要想将数据通过网络分享给我们的计算机,那么在计算机上就需要一个程序来接收数据,所以我们要指定MicroROS服务的IP地址。
第一步是获取当前主机的IP地址
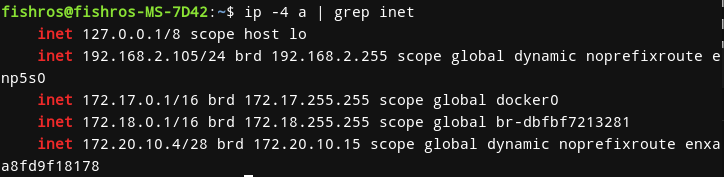
打开一个新的终端,输入ip -4 a | grep inet看看电脑的ip地址,一般可以看到多个网卡的,此时可以忽略172(docker)和127(本地)开头的ip地址,剩下的一般就是我们要的ip地址,比如小鱼这里的就是192.168.0.105接着我们继续使用配置助手配置udpserver_ip。
如果设置为前面的ip不可,如192.168.2.105,可以设置为后一项,如192.168.2.255
再重启MicroROS客户端即可显示数据,可以用键盘遥控