执行ros2 launch fishbot_description gazebo.launch.py,后rviz2报错
-
INFO] [1677068345.008024778] [rviz]: Message Filter dropping message: frame 'laser_link' at time 1215.834 for reason 'discarding message because the queue is full'
[INFO] [1677068345.199393723] [rviz]: Message Filter dropping message: frame 'laser_link' at time 1216.033 for reason 'discarding message because the queue is full'
[INFO] [1677068345.392289934] [rviz]: Message Filter dropping message: frame 'laser_link' at time 1216.234 for reason 'discarding message because the queue is full'
[INFO] [1677068345.584016204] [rviz]: Message Filter dropping message: frame 'laser_link' at time 1216.434 for reason 'discarding message because the queue is full'
我的软件版本是22.04的ubuntu,装的是humble版ros2。在按9章第三节的上述命令后,出现了discarding message的提示。在地图中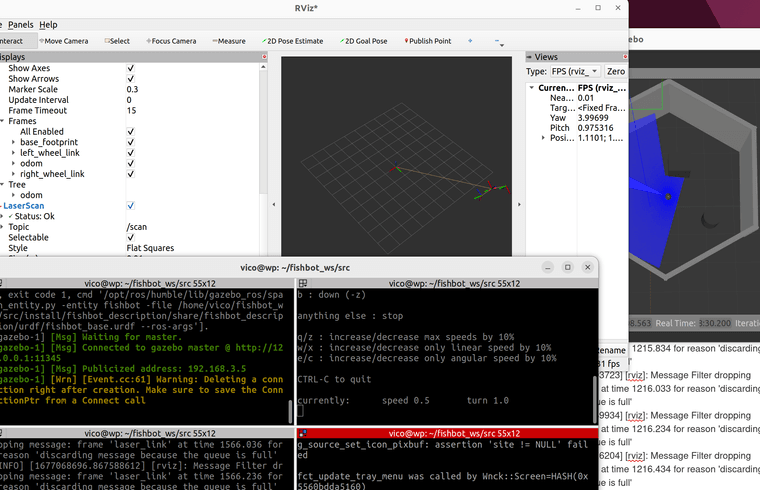 没有出现激光点云。如图界面所示
没有出现激光点云。如图界面所示 -
-
@小鱼
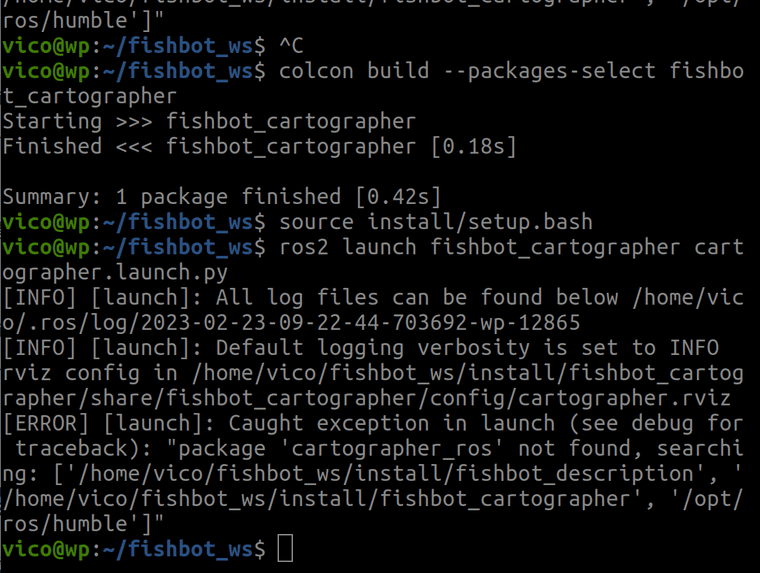 用新的章节内容后,也还是没有 正常启动。报的错误和之前一样
用新的章节内容后,也还是没有 正常启动。报的错误和之前一样 -
@vico1999 重新编译source即可
-
@小鱼 source 了以后不行,我是把报错所需要的文件夹,复制到提示找不到的目录后解决的