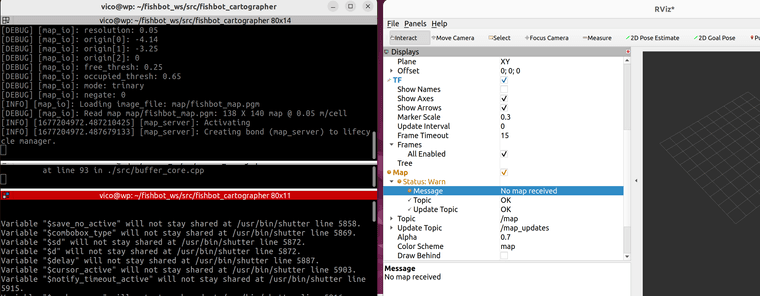
10.3中mapserver中载入地图后,rviz中不能显示
-
-
vico@wp:~/fishbot_ws/src/fishbot_cartographer/map$ ros2 topic info /map_updates
Type: map_msgs/msg/OccupancyGridUpdate
Publisher count: 0
Subscription count: 1
查看了一下,只发布了map 一个Topic。 map_updates 没有发布者。 所以是在哪里发布这个的呢 -
-
@小鱼 Node name: map_server
Node namespace: /
Topic type: nav_msgs/msg/OccupancyGrid
Endpoint type: PUBLISHER
GID: 01.0f.15.5d.37.ef.4c.59.01.00.00.00.00.00.1f.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: TRANSIENT_LOCAL
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: InfiniteSubscription count: 1
Node name: rviz
Node namespace: /
Topic type: nav_msgs/msg/OccupancyGrid
Endpoint type: SUBSCRIPTION
GID: 01.0f.15.5d.82.ee.ab.b9.01.00.00.00.00.00.20.04.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: VOLATILE
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: Infinite -
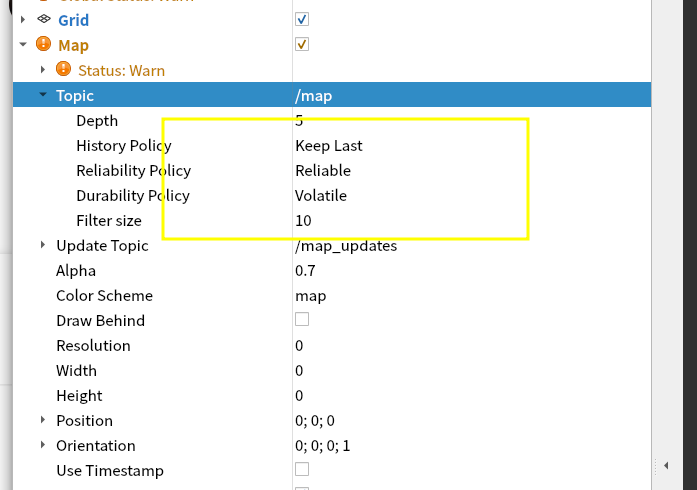
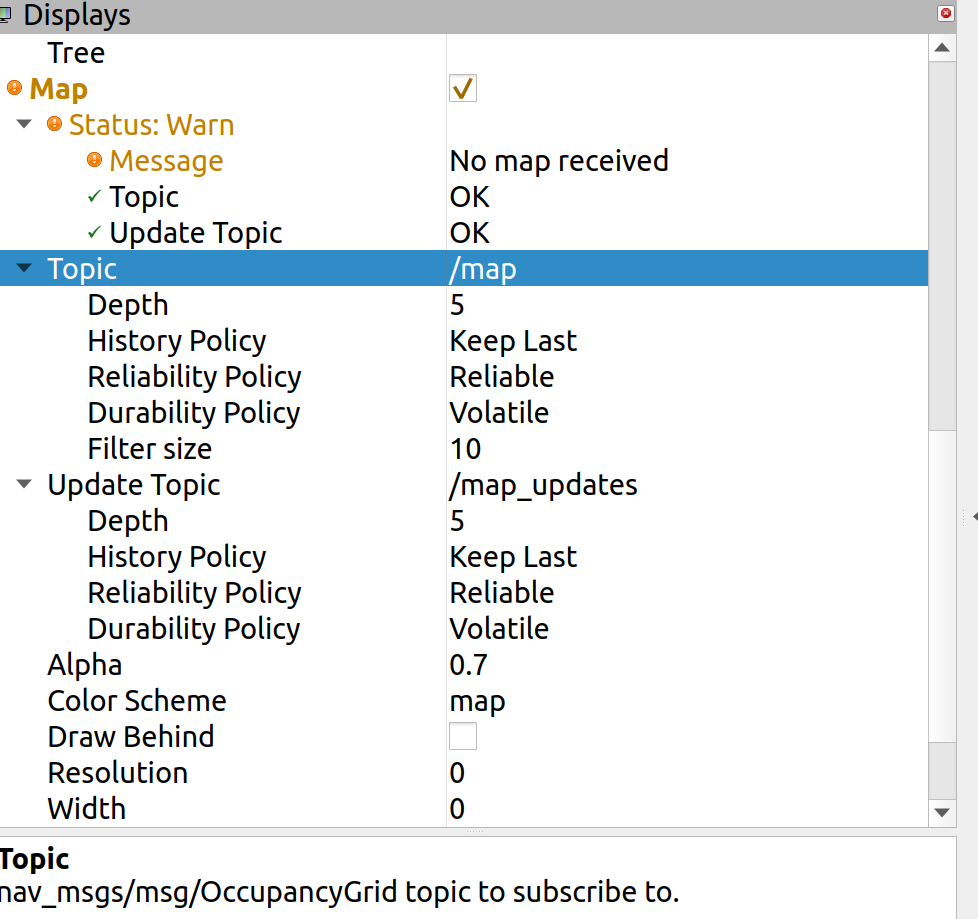
注意这里,两者并不相同
@vico1999 在 10.3中mapserver中载入地图后,rviz中不能显示 中说:
Durability: TRANSIENT_LOCAL
@vico1999 在 10.3中mapserver中载入地图后,rviz中不能显示 中说:
Reliability: RELIABLE
-
怎么修改mapserver中的参数呢
-
@vico1999 在 10.3中mapserver中载入地图后,rviz中不能显示 中说:
Node namespace: /
Topic type: nav_msgs/msg/OccupancyGrid
Endpoint type: PUBLISHER
GID: 01.0f.15.5d.37.ef.4c.59.01.00.00.00.00.00.1f.03.00.00.00.00.00.00.00.00
QoS profile:
Reliability: RELIABLE
History (Depth): UNKNOWN
Durability: TRANSIENT_LOCAL
Lifespan: Infinite
Deadline: Infinite
Liveliness: AUTOMATIC
Liveliness lease duration: Infinite按照这个改
-
 我的配置和你是一样的啊,还是不能显示
我的配置和你是一样的啊,还是不能显示 -
@vico1999 确定下是否发布了