ubuntu20.4 ros1noetic 安装奥比中光 Astra Pro RGBD摄像头
-
最牛b的机器视觉ORB_SLAM3运行的是ros1环境,所以ros1还要走一遍,先从安装摄像头开始。
这款摄像头我在ubuntu22.04 ros2 humble安装过,还算顺利,换了ros1,遇到很多的坑,几经波折,终于安装成功。
环境:ubuntu20.4 ros1 noetic
参考官网使用手册
https://developer.orbbec.com.cn/technical_library.html?id=49安装依赖
sudo apt install libgflags-dev ros-$ROS_DISTRO-image-geometry ros-$ROS_DISTRO-camera-info-manager\ ros-$ROS_DISTRO-image-transport ros-$ROS_DISTRO-image-publisher libgoogle-glog-dev libusb-1.0-0-dev libeigen3-devE: 无法定位软件包 ros-noetic-camera-info-managerros-noetic-image-transport
少2个包,貌似不影响使用,先忽略,以后有用在想办法。安装libuvc
git clone https://github.com/libuvc/libuvc.git cd libuvc mkdir build && cd build cmake .. && make -j4 sudo make install sudo ldconfig新建 ros workspace
mkdir -p ~/ros1_ws/src下载网址:
https://developer.orbbec.com.cn/download.html?id=181

将 OpenNISDK_ROS_xxx.tar.gz 解压并复制到 ~/ros_ws/src
编译
cd ~/ros1_ws catkin_make安装libusb rules
cd ~/ros1_ws source ./devel/setup.bash roscd astra_camera ./scripts/create_udev_rules sudo udevadm control --reload && sudo udevadm triggerVID:Vender ID供应商识别码
PID:Product ID产品识别码
每一个USB(Universal Serial BUS)都有VID和PID通过PID&VID来判断相机是否正常被识别
lsusb Bus 002 Device 002: ID 8087:0024 Intel Corp. Integrated Rate Matching Hub Bus 002 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 001 Device 006: ID 04f2:b2ea Chicony Electronics Co., Ltd Integrated Camera [ThinkPad] Bus 001 Device 005: ID 8086:0187 Intel Corp. Bus 001 Device 004: ID 0a5c:2110 Broadcom Corp. BCM2045B (BDC-2) [Bluetooth Controller] Bus 001 Device 024: ID 0e8f:0021 GreenAsia Inc. Multimedia Keyboard Controller Bus 001 Device 002: ID 8087:0024 Intel Corp. Integrated Rate Matching Hub Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub Bus 004 Device 001: ID 1d6b:0003 Linux Foundation 3.0 root hub Bus 003 Device 009: ID 0000:3825 USB OPTICAL MOUSE Bus 003 Device 005: ID 2bc5:0403 USB OPTICAL MOUSE Bus 003 Device 004: ID 2bc5:0501 USB2.0 Hub Bus 003 Device 002: ID 05e3:0608 Genesys Logic, Inc. Hub Bus 003 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hubID 2bc5:0403 (彩色相机)
ID 2bc5:0501 (深度相机)
但是我的是USB OPTICAL MOUSE,我总觉得和我的鼠标冲突,每次运行都拔掉鼠标,可是测试好了以后插着鼠标也正常了,不知道是哪里不对。
到这步usb好像和什么冲突,不出图像,卡了我2天重装了好几次才弄好,也不知道具体怎么好的。采取的方法
ubuntu20.04的 brltty 导致 USB 转串口连接失败
sudo dmesg | grep brltty
[ 0.077725] printk: console [tty0] enabled //控制台[tty0]已启用
sudo apt remove brltty //删除brltty卸载了brltty还是不行,以为系统内缺东西,想重装ubuntu,usb启动盘坏了没有重装,重新下载的OpenNI_SDK_ROS_v1.1.4_20220927_e5a9dc_Linux才出来图像,好像是不同版本sdk有差异。
启动相机
一定要注意摄像头版本,里面的launch文件对应不同摄像头,错了出不来图像。我的是astra_pro
在terminal 1source ./devel/setup.bash roslaunch astra_camera astra_pro.launch在terminal 2
source ./devel/setup.bash rviz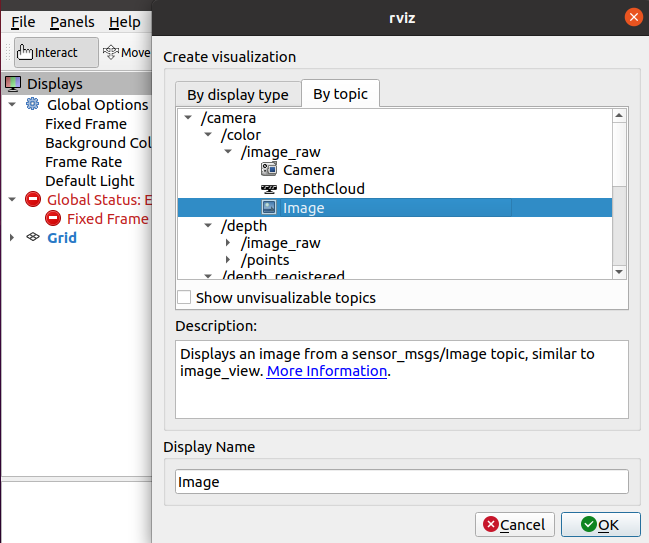
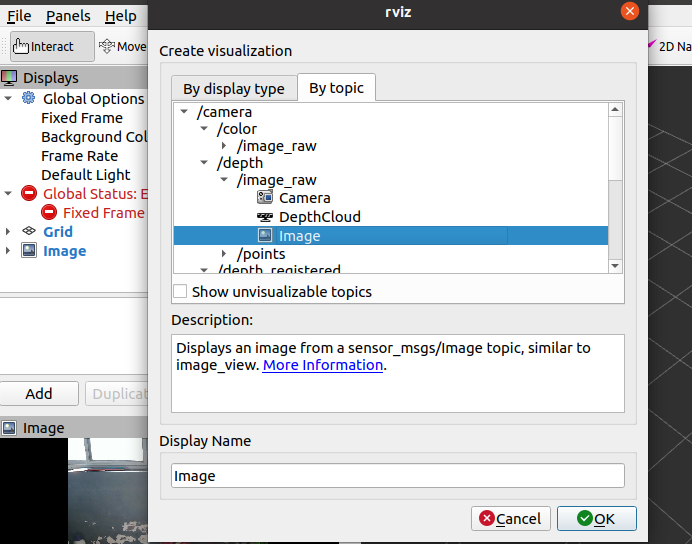
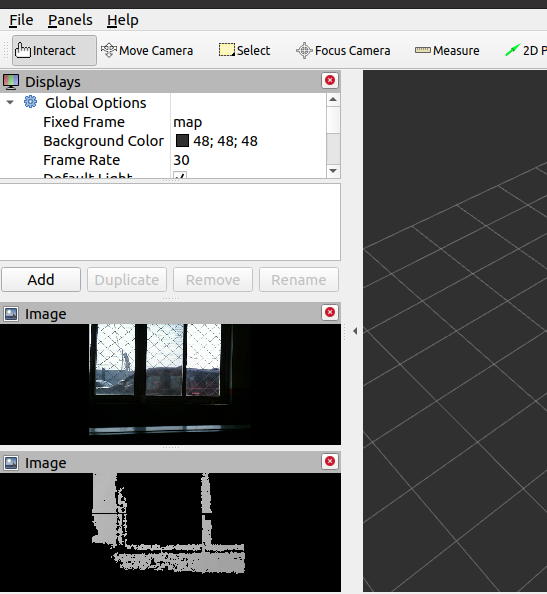
彩图和深度图都出来了。
查看 topics / services/ parameters (新开一个终端)rostopic list rosservice list rosparam listrostopic list
/camera/color/camera_info
/camera/color/image_raw
/camera/depth/camera_info
/camera/depth/image_raw
/camera/depth/points
/camera/depth_registered/points
/camera/extrinsic/depth_to_color
/camera/ir/camera_info
/camera/ir/image_raw
/camera/reset_device
/clicked_point
/initialpose
/move_base_simple/goal
/rosout
/rosout_agg
/tf
/tf_static
通过这2个topic :
/camera/color/image_raw
/camera/depth/image_raw
我们就可以随意给其他节点传彩图和深度图像了。到此安装结束,有遇到问题的我们可以一切探讨。
-
毛 毛哥成山轮胎机油保养 在 中 引用了 这个主题
-
-
