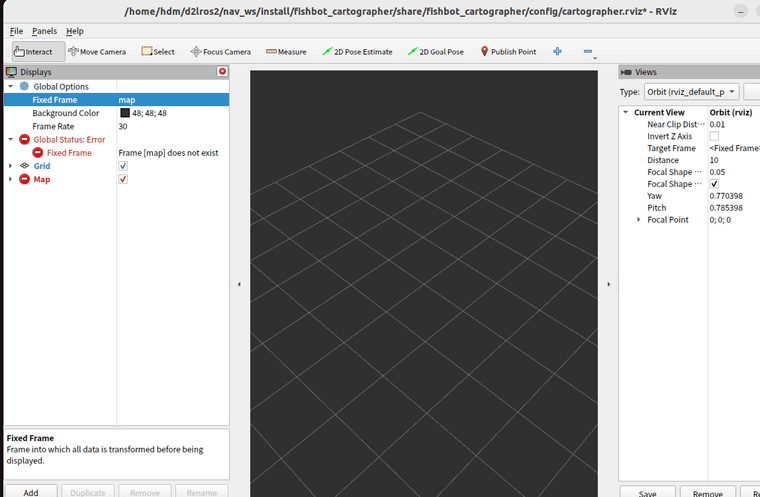
第十章fishbot建图rviz2的fixed frame报错,无法显示地图
-
fishbot_cartographer/cartographer.launch代码如下
import os from launch import LaunchDescription from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node from launch_ros.substitutions import FindPackageShare def generate_launch_description(): # 定位到功能包的地址 pkg_share = FindPackageShare(package='fishbot_cartographer').find('fishbot_cartographer') #=====================运行节点需要的配置======================================================================= # 是否使用仿真时间,我们用gazebo,这里设置成true use_sim_time = LaunchConfiguration('use_sim_time', default='true') # 地图的分辨率 resolution = LaunchConfiguration('resolution', default='0.05') # 地图的发布周期 publish_period_sec = LaunchConfiguration('publish_period_sec', default='1.0') # 配置文件夹路径 configuration_directory = LaunchConfiguration('configuration_directory',default= os.path.join(pkg_share, 'config') ) # 配置文件 configuration_basename = LaunchConfiguration('configuration_basename', default='fishbot_2d.lua') rviz_config_dir = os.path.join(pkg_share, 'config')+"/cartographer.rviz" print(f"rviz config in {rviz_config_dir}") #=====================声明三个节点,cartographer/occupancy_grid_node/rviz_node================================= cartographer_node = Node( package='cartographer_ros', executable='cartographer_node', name='cartographer_node', output='screen', parameters=[{'use_sim_time': use_sim_time}], arguments=['-configuration_directory', configuration_directory, '-configuration_basename', configuration_basename]) cartographer_occupancy_grid_node = Node( package='cartographer_ros', executable='cartographer_occupancy_grid_node', name='cartographer_occupancy_grid_node', output='screen', parameters=[{'use_sim_time': use_sim_time}], arguments=['-resolution', resolution, '-publish_period_sec', publish_period_sec]) rviz_node = Node( package='rviz2', executable='rviz2', name='rviz2', arguments=['-d', rviz_config_dir], parameters=[{'use_sim_time': use_sim_time}], output='screen') #===============================================定义启动文件======================================================== ld = LaunchDescription() ld.add_action(cartographer_node) ld.add_action(cartographer_occupancy_grid_node) ld.add_action(rviz_node) return ldfishbot_description/gazebo.launch代码如下
import os from launch import LaunchDescription from launch.actions import ExecuteProcess from launch_ros.actions import Node from launch_ros.substitutions import FindPackageShare def generate_launch_description(): robot_name_in_model = 'fishbot' package_name = 'fishbot_description' urdf_name = "fishbot_base.urdf" ld = LaunchDescription() pkg_share = FindPackageShare(package=package_name).find(package_name) urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}') gazebo_world_path = os.path.join(pkg_share, 'world/fishbot.world') # Start Gazebo server start_gazebo_cmd = ExecuteProcess( cmd=['gazebo', '--verbose','-s', 'libgazebo_ros_init.so', '-s', 'libgazebo_ros_factory.so',gazebo_world_path], output='screen') # Launch the robot spawn_entity_cmd = Node( package='gazebo_ros', executable='spawn_entity.py', arguments=['-entity', robot_name_in_model, '-file', urdf_model_path ], output='screen') ld.add_action(start_gazebo_cmd) ld.add_action(spawn_entity_cmd) return ldfishbot_description/display_rviz2.launch代码如下
import os from launch import LaunchDescription from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node from launch_ros.substitutions import FindPackageShare def generate_launch_description(): package_name = 'fishbot_description' urdf_name = "fishbot_base.urdf" ld = LaunchDescription() pkg_share = FindPackageShare(package=package_name).find(package_name) urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}') robot_state_publisher_node = Node( package='robot_state_publisher', executable='robot_state_publisher', arguments=[urdf_model_path] ) joint_state_publisher_node = Node( package='joint_state_publisher_gui', executable='joint_state_publisher_gui', name='joint_state_publisher_gui', arguments=[urdf_model_path] ) rviz2_node = Node( package='rviz2', executable='rviz2', name='rviz2', output='screen', ) # ld.add_action(joint_state_publisher_node) ld.add_action(robot_state_publisher_node) ld.add_action(rviz2_node) return ld -
-
ros2版本: humble ubuntu版本:22.04
-
此回复已被删除! -
按教程先执行的gazebo.launch再执行cartographer.launch
-
终端日志如下
终端1hdm@hdm-virtual-machine:~/d2lros2/nav_ws$ source install/setup.bash ros2 launch fishbot_description gazebo.launch.py not found: "/home/hdm/d2lros2/nav_ws/install/cartographer_ros_msgs/share/cartographer_ros_msgs/local_setup.bash" [INFO] [launch]: All log files can be found below /home/hdm/.ros/log/2023-05-15-08-40-32-100409-hdm-virtual-machine-3968 [INFO] [launch]: Default logging verbosity is set to INFO [INFO] [gazebo-1]: process started with pid [3993] [INFO] [spawn_entity.py-2]: process started with pid [3995] [spawn_entity.py-2] [INFO] [1684111234.837423372] [spawn_entity]: Spawn Entity started [spawn_entity.py-2] [INFO] [1684111234.839541462] [spawn_entity]: Loading entity XML from file /home/hdm/d2lros2/nav_ws/install/fishbot_description/share/fishbot_description/urdf/fishbot_base.urdf [spawn_entity.py-2] [INFO] [1684111234.847188459] [spawn_entity]: Waiting for service /spawn_entity, timeout = 30 [spawn_entity.py-2] [INFO] [1684111234.850326630] [spawn_entity]: Waiting for service /spawn_entity [gazebo-1] Gazebo multi-robot simulator, version 11.10.2 [gazebo-1] Copyright (C) 2012 Open Source Robotics Foundation. [gazebo-1] Released under the Apache 2 License. [gazebo-1] http://gazebosim.org [gazebo-1] [gazebo-1] Gazebo multi-robot simulator, version 11.10.2 [gazebo-1] Copyright (C) 2012 Open Source Robotics Foundation. [gazebo-1] Released under the Apache 2 License. [gazebo-1] http://gazebosim.org [gazebo-1] [gazebo-1] [Msg] Waiting for master. [gazebo-1] [Msg] Connected to gazebo master @ http://127.0.0.1:11345 [gazebo-1] [Msg] Publicized address: 192.168.1.103 [gazebo-1] [Wrn] [GuiIface.cc:120] Could not find the Qt platform plugin "wayland" in "" [spawn_entity.py-2] [INFO] [1684111237.923595500] [spawn_entity]: Calling service /spawn_entity [spawn_entity.py-2] [INFO] [1684111238.817074194] [spawn_entity]: Spawn status: SpawnEntity: Successfully spawned entity [fishbot] [gazebo-1] [INFO] [1684111239.028024078] [diff_drive]: Wheel pair 1 separation set to [0.200000m] [gazebo-1] [INFO] [1684111239.029597513] [diff_drive]: Wheel pair 1 diameter set to [0.065000m] [gazebo-1] [INFO] [1684111239.035535833] [diff_drive]: Subscribed to [/cmd_vel] [gazebo-1] [INFO] [1684111239.047795731] [diff_drive]: Advertise odometry on [/odom] [gazebo-1] [INFO] [1684111239.067134085] [diff_drive]: Publishing odom transforms between [odom] and [base_footprint] [gazebo-1] [INFO] [1684111239.111004399] [fishbot_joint_state]: Going to publish joint [right_wheel_joint] [gazebo-1] [INFO] [1684111239.114673636] [fishbot_joint_state]: Going to publish joint [left_wheel_joint] [INFO] [spawn_entity.py-2]: process has finished cleanly [pid 3995] [gazebo-1] context mismatch in svga_surface_destroy [gazebo-1] context mismatch in svga_surface_destroy终端2
/d2lros2/nav_ws/src$ source install/setup.bash ros2 launch fishbot_cartographer cartographer.launch.py not found: "/home/hdm/d2lros2/nav_ws/src/install/cartographer_ros_msgs/share/cartographer_ros_msgs/local_setup.bash" [INFO] [launch]: All log files can be found below /home/hdm/.ros/log/2023-05-15-11-41-48-291804-hdm-virtual-machine-57453 [INFO] [launch]: Default logging verbosity is set to INFO rviz config in /home/hdm/d2lros2/nav_ws/src/install/fishbot_cartographer/share/fishbot_cartographer/config/cartographer.rviz [INFO] [cartographer_node-1]: process started with pid [57454] [INFO] [cartographer_occupancy_grid_node-2]: process started with pid [57456] [INFO] [rviz2-3]: process started with pid [57458] [rviz2-3] Warning: Ignoring XDG_SESSION_TYPE=wayland on Gnome. Use QT_QPA_PLATFORM=wayland to run on Wayland anyway. [cartographer_node-1] [INFO] [1684122108.972841501] [cartographer logger]: I0515 11:41:48.000000 57454 configuration_file_resolver.cc:41] Found '/home/hdm/d2lros2/nav_ws/src/install/fishbot_cartographer/share/fishbot_cartographer/config/fishbot_2d.lua' for 'fishbot_2d.lua'. [cartographer_node-1] [INFO] [1684122108.974296311] [cartographer logger]: I0515 11:41:48.000000 57454 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/map_builder.lua' for 'map_builder.lua'. [cartographer_node-1] [INFO] [1684122108.974492682] [cartographer logger]: I0515 11:41:48.000000 57454 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/map_builder.lua' for 'map_builder.lua'. [cartographer_node-1] [INFO] [1684122108.974755899] [cartographer logger]: I0515 11:41:48.000000 57454 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/pose_graph.lua' for 'pose_graph.lua'. [cartographer_node-1] [INFO] [1684122108.974834889] [cartographer logger]: I0515 11:41:48.000000 57454 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/pose_graph.lua' for 'pose_graph.lua'. [cartographer_node-1] [INFO] [1684122108.975225587] [cartographer logger]: I0515 11:41:48.000000 57454 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder.lua' for 'trajectory_builder.lua'. [cartographer_node-1] [INFO] [1684122108.975299146] [cartographer logger]: I0515 11:41:48.000000 57454 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder.lua' for 'trajectory_builder.lua'. [cartographer_node-1] [INFO] [1684122108.975401550] [cartographer logger]: I0515 11:41:48.000000 57454 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder_2d.lua' for 'trajectory_builder_2d.lua'. [cartographer_node-1] [INFO] [1684122108.975453097] [cartographer logger]: I0515 11:41:48.000000 57454 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder_2d.lua' for 'trajectory_builder_2d.lua'. [cartographer_node-1] [INFO] [1684122108.975979673] [cartographer logger]: I0515 11:41:48.000000 57454 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder_3d.lua' for 'trajectory_builder_3d.lua'. [cartographer_node-1] [INFO] [1684122108.976082808] [cartographer logger]: I0515 11:41:48.000000 57454 configuration_file_resolver.cc:41] Found '/opt/ros/humble/share/cartographer/configuration_files/trajectory_builder_3d.lua' for 'trajectory_builder_3d.lua'. -
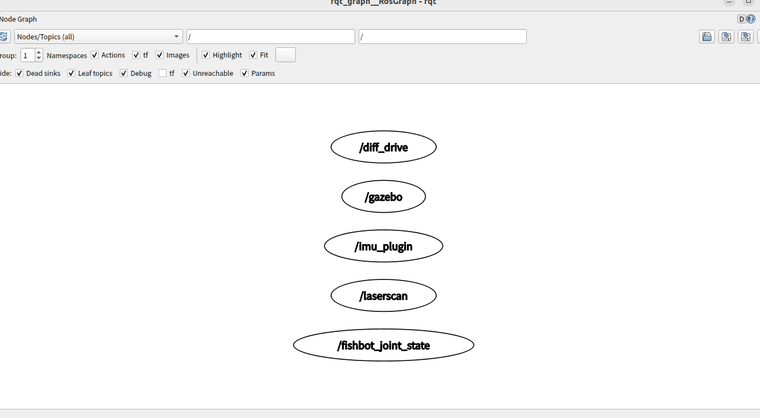
@441755535 用rqt看下节点和话题是否都有
-
-
@441755535 话题很孤立的感觉,没有节点订阅,有运行建图节点吗