ros2 slam建图,添加雷达显示插件报错
-
第一步:启动了底盘的驱动,能够正确的收到/cmd_vel跟/odom能够正常的使用键盘控制小车移动,第二步:我启动了雷达驱动,能够正常的订阅到/scan这个话题,打印话题也有消息。第三步我使用静态发布了tf坐标变换base_footprint到base_link的,base_link到laser的rviz2中能够正常显示,第四步:我启动了gmapping建图终端没有任何报错。第五步我打开rviz2添加laserScan插件显示雷达数据终端报错
[ERROR] [1684382810.423258161] [rviz2]: Lookup would require extrapolation into the future. Requested time 1684382810.409265 but the latest data is at time 1684382810.398495, when looking up transform from frame [laser] to frame [map] [INFO] [1684382811.808010924] [rviz]: Message Filter dropping message: frame 'laser' at time 1684382810.808 for reason 'discarding message because the queue is full'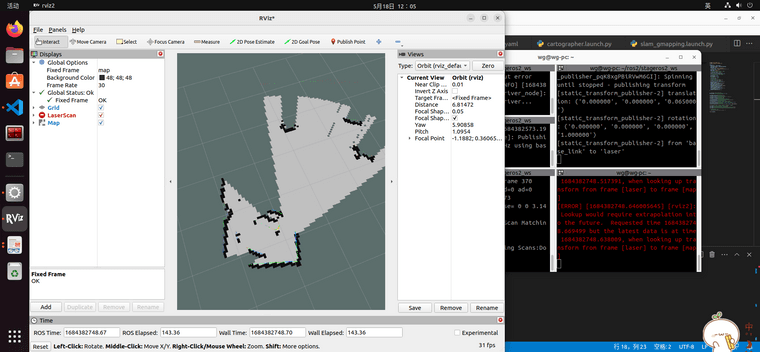
-
@2308607900 我使用的是ros2 的humble版本
-
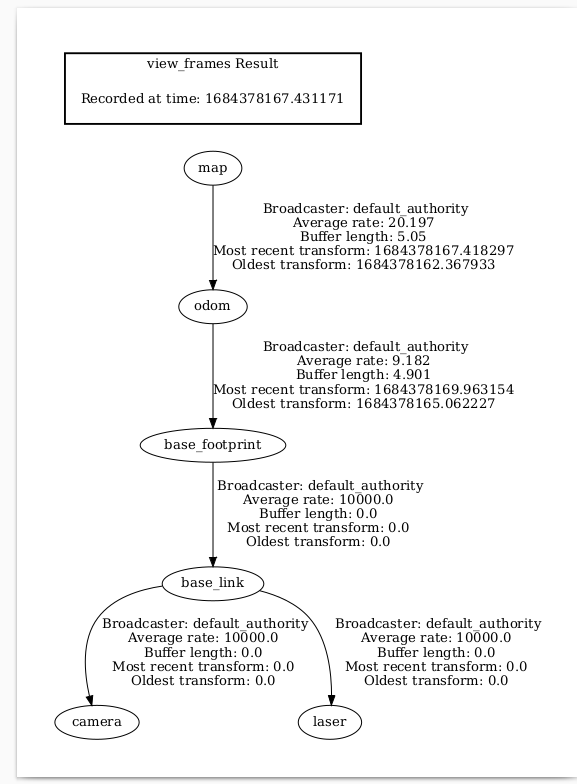
这是tf树 -
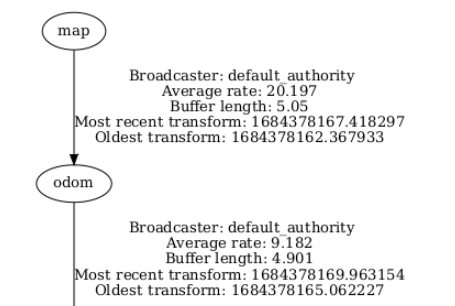
@2308607900 注意这里的时间差异,map->odom ,odom->base_footprint
-
@小鱼 那应该怎么修改呢?
-
@2308607900 一般修改odom到base_footprint的时间,提前或者往后点和 map 对其