关于手眼标定,小白求助...
-
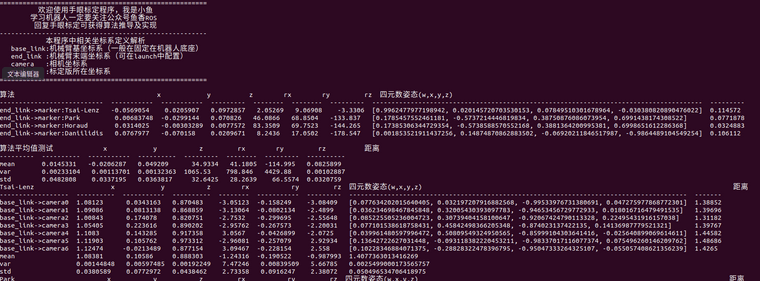
标定结果出来了,怎么运用啊。
眼在手上,已知相机获取aruco码的 X Y Z 及姿态,当前机械臂的X Y Z UVW,如何通过标定结果计算出机械臂到aruco码世界坐标
-
-
这个有实例么
-
@304247608 哥们,这个问题搞定了吗
标定结果出来了,怎么运用啊。
眼在手上,已知相机获取aruco码的 X Y Z 及姿态,当前机械臂的X Y Z UVW,如何通过标定结果计算出机械臂到aruco码世界坐标
这个有实例么
@304247608 哥们,这个问题搞定了吗