哪位大佬见过下面这种基于YOLO进行语义地图创建的方案或者源码?我想学习学习,如何实现激光聚类与YOLO识别的进行融合的。感谢,有偿
-
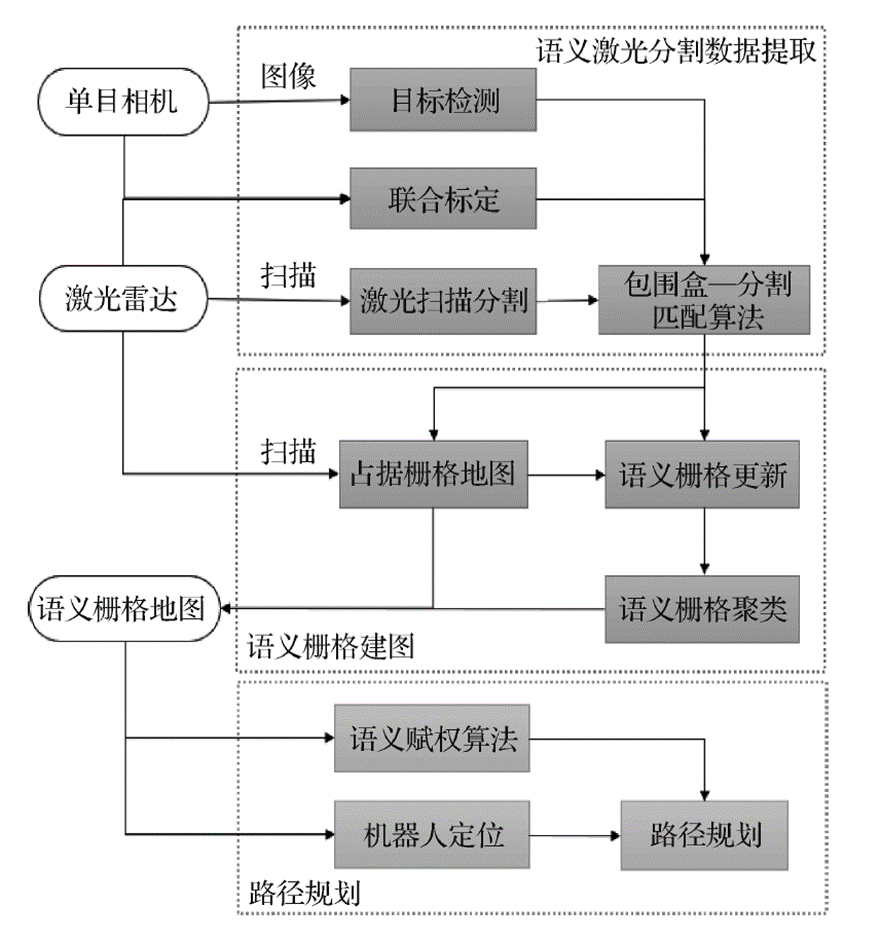
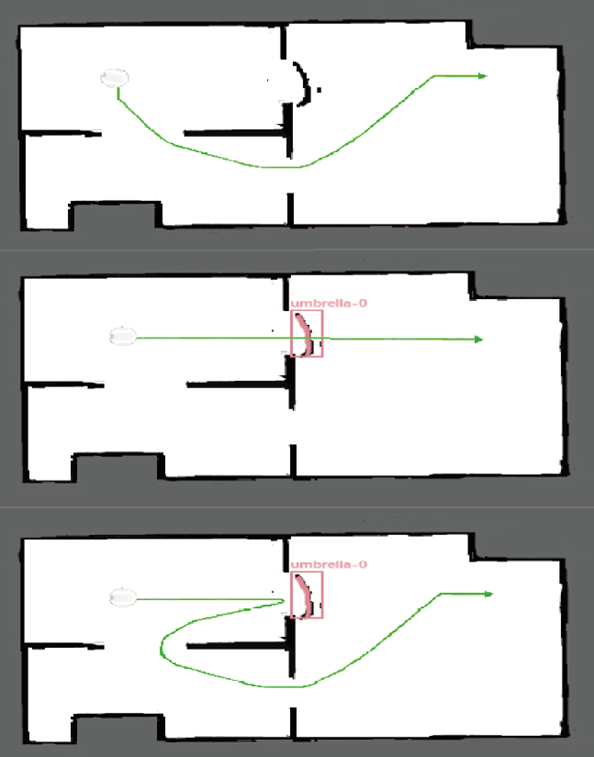
各位大佬,最近看了这样一篇ROS语义地图的论文,感觉创新点很好,方案如下:通过YOLO识别物体并进行标注,利用激光扫描环境建图,对不同物体进行分割聚类,将YOLO识别的物体标注信息与激光扫描的分割聚类数据融合并融入占据栅格地图中,实现各物体对应语义激光分割的提取和语义栅格地图的标注,得到与真实环境一致的语义栅格地图。导航时在语义栅格地图的基础上,利用全局路径规划和语义赋权算法,即将雨伞等认为是飞障碍物体,可以穿过。
哪位大佬见过这种方案的源码啊,我想学习学习,如何实现激光聚类与YOLO识别的进行融合的。感谢,有偿
流程框图
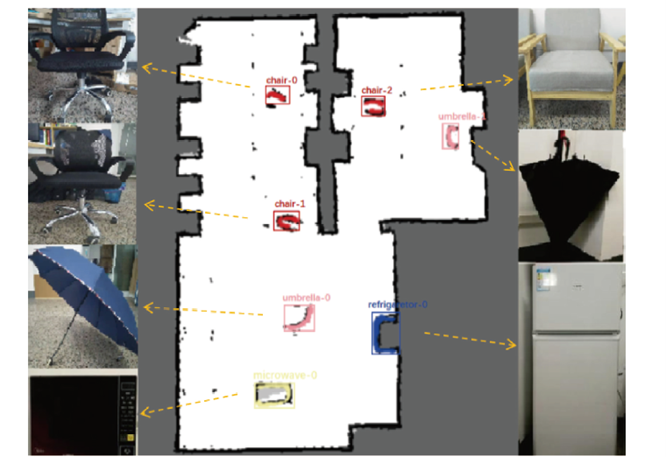
建图后的效果
导航效果
哪位大佬见过这种方案的源码啊,我想学习学习,如何实现激光聚类与YOLO识别的进行融合的。感谢,有偿