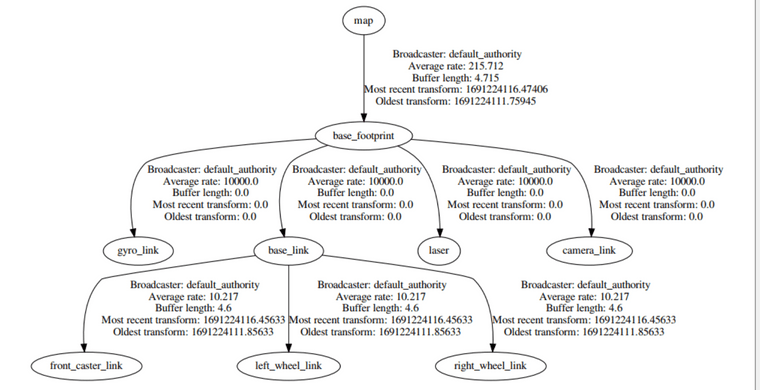
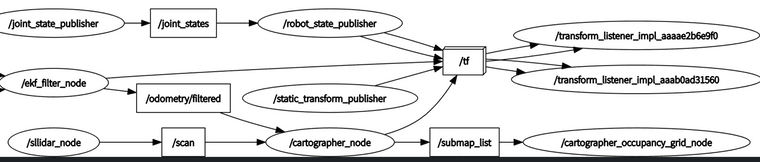
ros2在使用cartographer建图时报错,下面有我的tf2树
-
[cartographer_node-1] Warning: Invalid frame ID "laser" passed to canTransform argument target_frame - frame does not exist
[cartographer_node-1] at line 133 in /tmp/binarydeb/ros-eloquent-tf2-0.12.6/src/buffer_core.cpp
[occupancy_grid_node-2] [WARN] [cartographer_occupancy_grid_node]: submap_slices and last_frame_id is empty
-
你的上位机是虚拟机吗?版本是什么