你的上位机是虚拟机吗?版本是什么
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
1
13392137118 发布的最新帖子
-
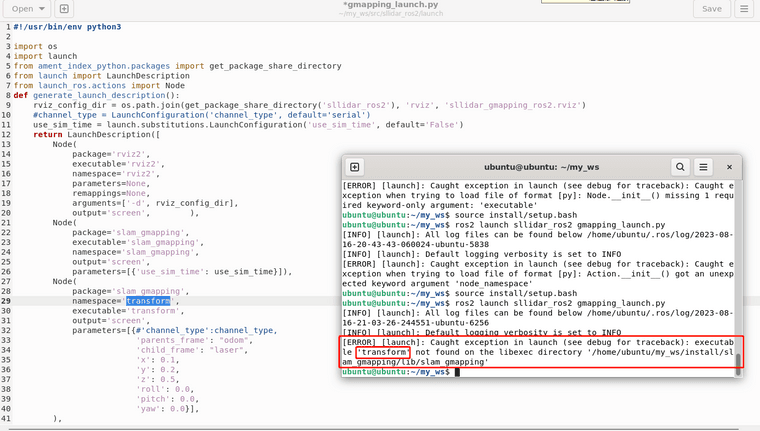
ros2 slam建图,提示executable 'transform' not found on the libexec directory '/home/ubuntu/my_ws/install/slam_gmapping/lib/slam_gmapping'发布在 ROS2
我用一键安装了ros2 的humble版本,上位机接了雷达,在雷达启动、扫描正常后,我运行“ros2 launch sllidar_ros2 gmapping_launch.py”出现error:executable 'transform' not found on the libexec directory '/home/ubuntu/my_ws/install/slam_gmapping/lib/slam_gmapping'。
-
求救:小车电机的问题发布在 ROS2
我在虚拟机写了一个server的client节点,当监测到键盘按下i字母时,node.send_request到小车的上位机;小车写了一个server的server节点,当收到i字母按下的信息后,执行“前进”。
问题是,键盘按下k时,希望小车停止;当client节点node.send_request到小车的上位机,但小车此时仍在执行“前进”的while循环里面,无法响应按键k被按下的信息......
小车的电机控制,不知道是要通过“话题,频繁发送指令到小车,而小车不做while循环”这种方法,还是有其他的方法?