运行autoware.auto的ndt_mapping_nodes时,报错如下
-
sen@ubuntu:~$ ros2 launch ndt_mapping_nodes ndt_mapper.launch.py
[INFO] [launch]: All log files can be found below /home/sen/.ros/log/2023-09-02-17-19-31-300511-ubuntu-58843
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [static_transform_publisher-1]: process started with pid [58845]
[INFO] [ndt_mapper_node_exe-2]: process started with pid [58847]
[static_transform_publisher-1] [INFO] [1693646371.426224667] [static_transform_publisher_dFRhl7QiYzYD7IOr]: Spinning until killed publishing transform from 'odom' to 'base_link'
[ndt_mapper_node_exe-2] /home/sen/Desktop/auto_Auto_ws/install/ndt_mapping_nodes/lib/ndt_mapping_nodes/ndt_mapper_node_exe: symbol lookup error: /home/sen/Desktop/auto_Auto_ws/install/ndt_mapping_nodes/lib/libndt_mapping_nodes.so: undefined symbol: _ZN8autoware10perception7filters10voxel_grid6ConfigC1ERKN13geometry_msgs3msg8Point32_ISaIvEEESA_SA_m
[ERROR] [ndt_mapper_node_exe-2]: process has died [pid 58847, exit code 127, cmd '/home/sen/Desktop/auto_Auto_ws/install/ndt_mapping_nodes/lib/ndt_mapping_nodes/ndt_mapper_node_exe --ros-args -r __node:=ndt_mapper_node -r __ns:=/mapper --params-file /home/sen/Desktop/auto_Auto_ws/install/ndt_mapping_nodes/share/ndt_mapping_nodes/param/ndt_mapper.param.yaml -r points_in:=/lidar_front/points_filtered_downsampled -r points_registered:=/lidar_front/points_registered'].

@小鱼 大佬能帮忙看看吗
-
config.hpp的 cmakelists 文件如下:
cmake_minimum_required(VERSION 3.5)Export headers
project(voxel_grid)
dependencies
find_package(ament_cmake_auto REQUIRED)
ament_auto_find_build_dependencies()ament_auto_add_library(${PROJECT_NAME} SHARED
include/voxel_grid/config.hpp
include/voxel_grid/voxel.hpp
include/voxel_grid/voxels.hpp
include/voxel_grid/voxel_grid.hpp
include/voxel_grid/visibility_control.hpp
src/config.cpp
src/voxels.cpp
src/voxel_grid.cpp
)
autoware_set_compile_options(${PROJECT_NAME})if(BUILD_TESTING)
run linters
find_package(ament_lint_auto REQUIRED)
ament_lint_auto_find_test_dependencies()gtest
set(VOXEL_GRID_GTEST voxel_grid_gtest)
ament_add_gtest(${VOXEL_GRID_GTEST} test/src/test_voxel_grid.cpp)
autoware_set_compile_options(${VOXEL_GRID_GTEST})
target_compile_options(${VOXEL_GRID_GTEST} PRIVATE -Wno-sign-conversion -Wno-double-promotion)
target_link_libraries(${VOXEL_GRID_GTEST} ${PROJECT_NAME})
target_include_directories(${VOXEL_GRID_GTEST} PRIVATE "test/include" "include")
ament_target_dependencies(${VOXEL_GRID_GTEST} "geometry_msgs")
endif()Ament Exporting
ament_auto_package()
ndt_mapping_nodes的cmakelists文件如下:
ament_target_dependencies(
ndt_mapping_nodes
"rclcpp"
"localization_common"
"point_cloud_mapping"
"ndt"
"optimization"
"autoware_auto_common"
"rclcpp_components"
"tf2_msgs"
"point_cloud_msg_wrapper"
"geometry_msgs"
) -
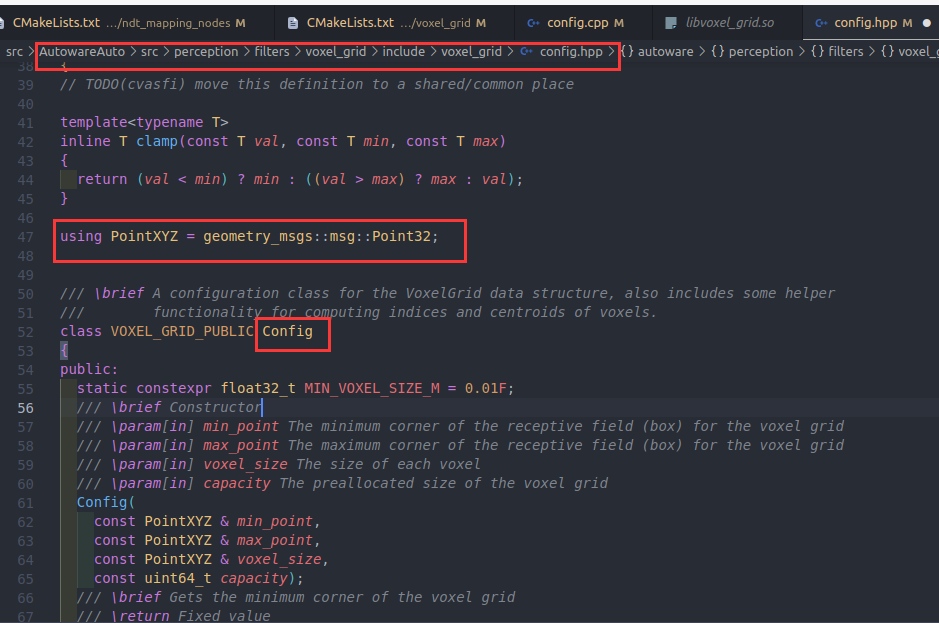
@sen 在 运行autoware.auto的ndt_mapping_nodes时,报错如下 中说:
undefined symbol: _ZN8autoware10perception7filters10voxel_grid6ConfigC1ERKN13geometry_msgs3msg8Point32_ISaIvEEESA_SA_m
这种一般是某个函数没有定义