ROS2,Action通讯初始化send_goal_options时报错
-
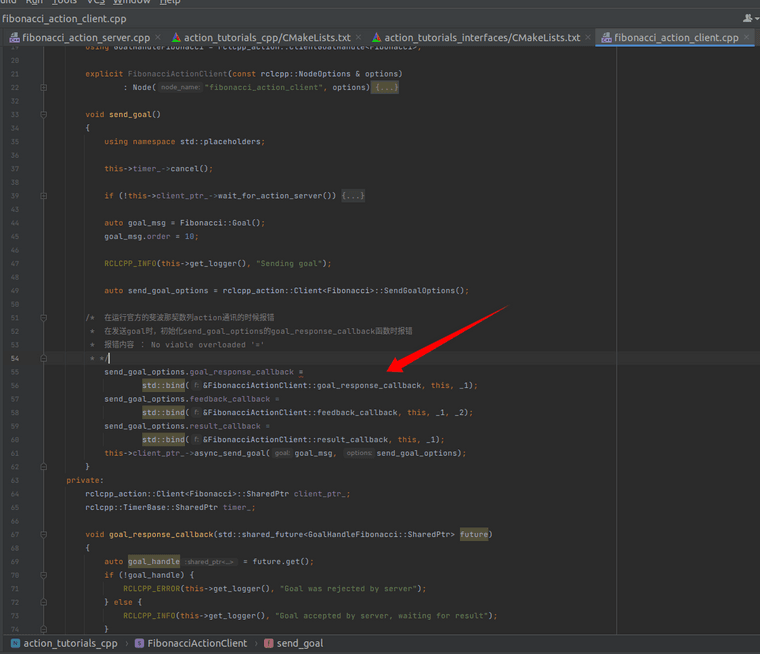
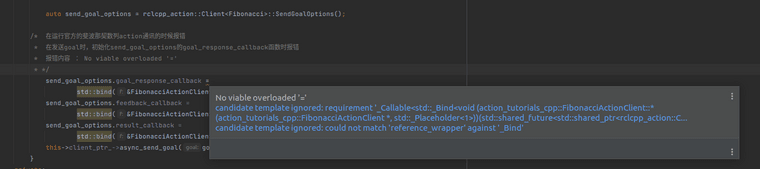
佬们,求救。在运行官方的斐波那契数列action通讯的时候报错,在发送goal时,初始化send_goal_options的goal_response_callback函数时报错,报错内容 : No viable overloaded '=':
官网地址:http://dev.ros2.fishros.com/doc/Tutorials/Actions/Writing-a-Cpp-Action-Server-Client.html
-
@1307931648 看这个教程:http://fishros.org/doc/ros2/humble/
最新版的,之前的函数可能发生了变换