launch文件启动gazebo,gazebo打开了,但是没有加载出urdf模型
-
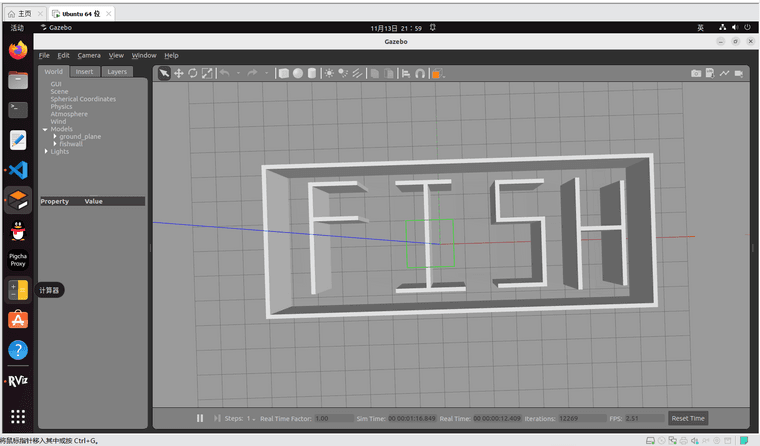
我按照仿真篇的教程编写了launch文件,改了一下名字,然后gazebo打开了,但是里面没有加载出urdf模型,没有报错,只有一个警告
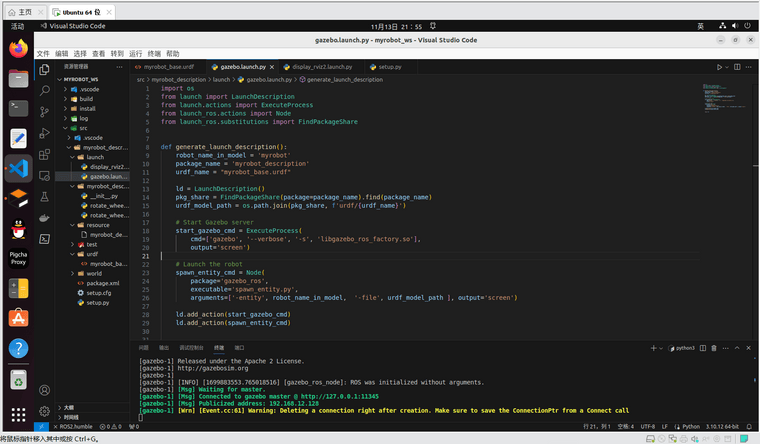

launch文件如下
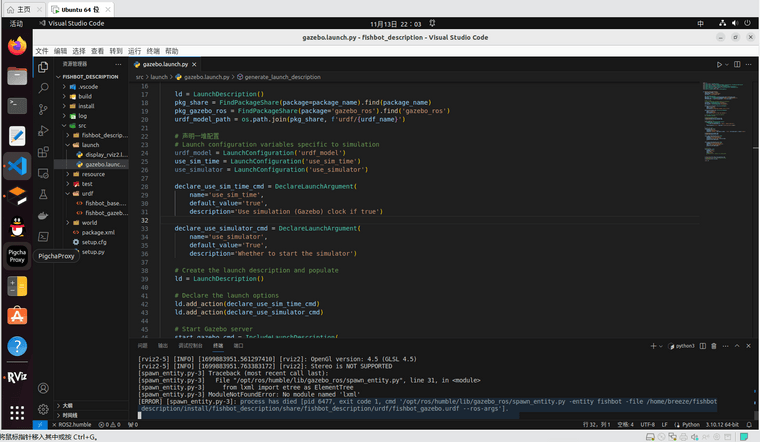
import os from launch import LaunchDescription from launch.actions import ExecuteProcess from launch_ros.actions import Node from launch_ros.substitutions import FindPackageShare def generate_launch_description(): robot_name_in_model = 'myrobot' package_name = 'myrobot_description' urdf_name = "myrobot_base.urdf" ld = LaunchDescription() pkg_share = FindPackageShare(package=package_name).find(package_name) urdf_model_path = os.path.join(pkg_share, f'urdf/{urdf_name}') # Start Gazebo server start_gazebo_cmd = ExecuteProcess( cmd=['gazebo', '--verbose', '-s', 'libgazebo_ros_factory.so'], output='screen') # Launch the robot spawn_entity_cmd = Node( package='gazebo_ros', executable='spawn_entity.py', arguments=['-entity', robot_name_in_model, '-file', urdf_model_path ], output='screen') ld.add_action(start_gazebo_cmd) ld.add_action(spawn_entity_cmd) return ld然后我下载鱼香ros里的文件,编译运行后也只打开了世界,没有加载出模型,有报错
-
@小鱼 在 提问前必看!一定要看!必须看一下! 中说:
一个好的提问不仅能够帮助自己理清楚问题,还有助于别人快速帮助到你。——提问的智慧
问题一定要描述清楚,终端打印一定复制粘贴,方便回答者检索和引用(你可以在linux系统上打开浏览器进社区)
基本的Markdown语法一定要学习下,有的小伙伴图片代码一团糟
提问时一定要提供尽可能多的信息(系统版本,ROS版本,前后操作,终端日志),包括你的目的,比如你其实想装装某个库遇到问题,不要只说这个问题,因为可能有更好的替代方案
先搜索再提问,很多问题其实都有解决方案,确保你自己对自己的问题有一定了解再提问
尽量一句话说完,不要把社区当微信聊天一样用,每一个回复都尽量提供更多的的信息。