ROS仿真一个可动小车时,单独在RVIZ里查看小车模型参数没有问题,但是在gazebo中驱动小车时,终端报错且RVIZ中小车模型出现错误
-
-
操作系统:ubantu18.04
-
ROS版本:melodic
-
gazebo9
新手小白在做一个可动小车的仿真时,遇到了如下问题,恳请各位相助!
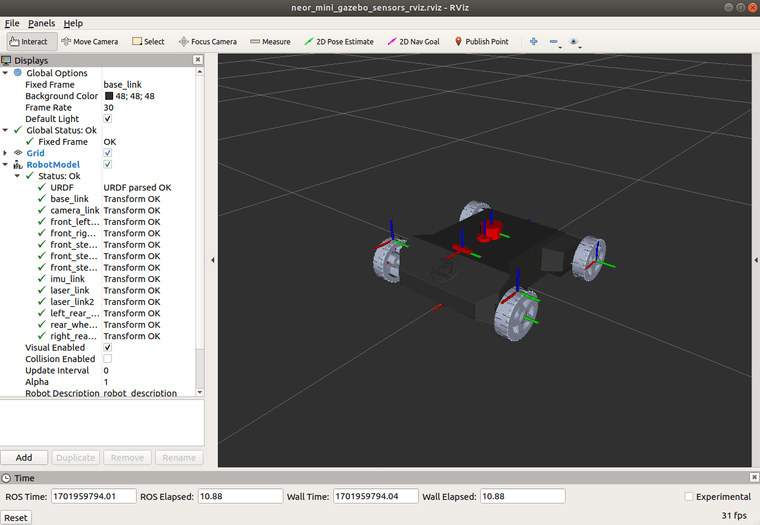
我在RVIZ里查看小车模型时可以得到下图所示的模型图
但是当我输入命令
roslaunch steer_mini_gazebo steer_mini_sim.launch
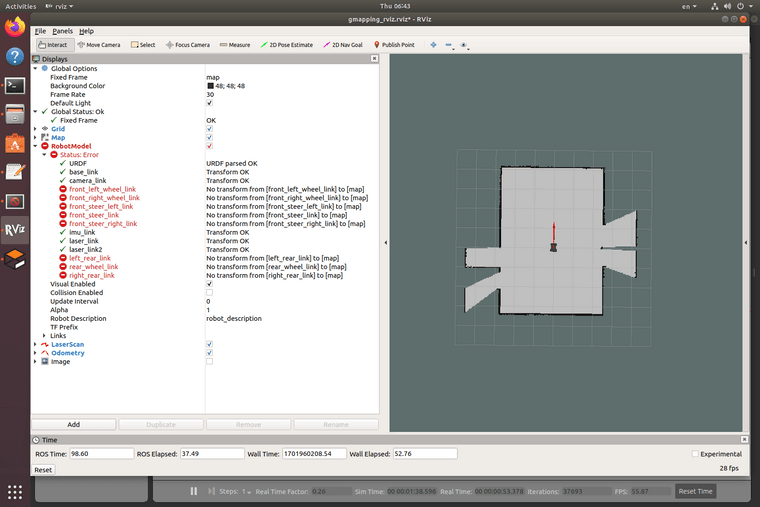
在gazebo中驱动小车时,却出现了如下报错
[ INFO] [1701960022.508446103, 61.242000000]: gazebo_ros_control plugin is waiting for model URDF in parameter [robot_description] on the ROS param server. [FATAL] [1701960022.609885892, 61.242000000]: Failed to create robot simulation interface loader: Could not find library corresponding to plugin steer_bot_hardware_gazebo/SteerBotHardwareGazebo. Make sure the plugin description XML file has the correct name of the library and that the library actually exists. [ INFO] [1701960022.610109458, 61.242000000]: Loaded gazebo_ros_control.且在RIVIZ中车轮的link也无法识别,如下图所示
在网上找了很久都没找到解决方案,恳请各位大佬帮忙!万分感谢!
相关代码附在下面:
- 小车的urdf文件
<?xml version="1.0" encoding="utf-8"?> <!-- This URDF was automatically created by SolidWorks to URDF Exporter! Originally created by Stephen Brawner (brawner@gmail.com) Commit Version: 1.5.1-0-g916b5db Build Version: 1.5.7152.31018 For more information, please see http://wiki.ros.org/sw_urdf_exporter --> <robot name="neor_mini"> <link name="base_link"> <!-- avoid root link inertia warnings, annotation --> <!-- <inertial> <origin xyz="0.030649671440691 -1.79069899872708E-05 0.0558717976709459" rpy="0 0 0" /> <mass value="1.72617713171385" /> <inertia ixx="0.0107311274569357" ixy="-3.24164649120244E-08" ixz="0.00169188715816868" iyy="0.0198871551919603" iyz="2.40252669081509E-07" izz="0.0269841937242323" /> </inertial> --> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/base_link.dae" /> </geometry> <material name=""> <color rgba="0.250980392156863 0.250980392156863 0.250980392156863 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/base_link.STL" /> </geometry> </collision> </link> <link name="rear_wheel_link"> <inertial> <origin xyz="-8.88178419700125E-16 -2.05391259555654E-14 -0.00112500000001892" rpy="0 0 0" /> <mass value="5.65486677646169E-05" /> <inertia ixx="1.32005796313028E-10" ixy="-1.938704560671E-27" ixz="2.13770572261755E-26" iyy="1.32005796313028E-10" iyz="-7.60216295195271E-25" izz="2.03575203952622E-10" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/rear_wheel_link.STL" /> </geometry> <material name=""> <color rgba="0.274509803921569 1 0.247058823529412 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/rear_wheel_link.STL" /> </geometry> </collision> </link> <joint name="rear_wheel_joint" type="continuous"> <origin xyz="-0.181499999999597 0 0.0399999999987674" rpy="0 0 0" /> <parent link="base_link" /> <child link="rear_wheel_link" /> <axis xyz="0 1 0" /> </joint> <link name="left_rear_link"> <inertial> <origin xyz="7.85229659072684E-11 -0.0196762547002777 4.85059770127805E-11" rpy="0 0 0" /> <mass value="0.29556182905038" /> <inertia ixx="0.000374087423652291" ixy="2.19336154342606E-13" ixz="-5.50404301757561E-12" iyy="0.000661017199375587" iyz="-5.10049385981967E-14" izz="0.000374087441459994" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/left_rear_link.STL" /> </geometry> <material name=""> <color rgba="0.792156862745098 0.819607843137255 0.933333333333333 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/left_rear_link.STL" /> </geometry> </collision> </link> <joint name="left_rear_joint" type="continuous"> <origin xyz="-0.181499999999595 0.228542434993694 0.0399999999991634" rpy="0 0 0" /> <parent link="base_link" /> <child link="left_rear_link" /> <axis xyz="0 1 0" /> <limit lower="-3.14" upper="3.14" effort="0" velocity="0" /> </joint> <link name="right_rear_link"> <inertial> <origin xyz="7.8521189550429E-11 0.0196762545376323 3.35983463273237E-11" rpy="0 0 0" /> <mass value="0.295561829050389" /> <inertia ixx="0.000374087423652306" ixy="-2.1933774523493E-13" ixz="5.50404145624456E-12" iyy="0.000661017199375601" iyz="-5.10073974604221E-14" izz="0.000374087441459995" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/right_rear_link.STL" /> </geometry> <material name=""> <color rgba="0.792156862745098 0.819607843137255 0.933333333333333 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/right_rear_link.STL" /> </geometry> </collision> </link> <joint name="right_rear_joint" type="continuous"> <origin xyz="-0.181499999999595 -0.228542434994426 0.0399999999991584" rpy="0 0 0" /> <parent link="base_link" /> <child link="right_rear_link" /> <axis xyz="0 1 0" /> <limit lower="-3.14" upper="3.14" effort="0" velocity="0" /> </joint> <link name="front_steer_link"> <inertial> <origin xyz="-2.1316282072803E-14 3.67778030252452E-11 -0.00112486602459905" rpy="0 0 0" /> <mass value="5.65486677646163E-05" /> <inertia ixx="1.32005796313026E-10" ixy="1.16322273640277E-26" ixz="1.20446157864484E-28" iyy="1.32005796313026E-10" iyz="-8.66481261175625E-27" izz="2.03575203952619E-10" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/front_steer_link.STL" /> </geometry> <material name=""> <color rgba="0.274509803921569 1 0.247058823529412 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/front_steer_link.STL" /> </geometry> </collision> </link> <joint name="front_steer_joint" type="revolute"> <origin xyz="0.172883370897628 0 -0.00376561854722868" rpy="0 0 0" /> <parent link="base_link" /> <child link="front_steer_link" /> <axis xyz="0 0 1" /> <limit lower="-0.72" upper="0.72" effort="0" velocity="0" /> </joint> <!-- In order to fit ackermann simulation plugins's request,amend the front steer link and it's joint --> <link name="front_steer_right_link"> <!-- remember add inertial label,if not,and it can't visual on gazebo--> <inertial> <origin xyz="9.44636555644252E-08 -0.000295273745285485 -8.13046296954667E-11" rpy="0 0 0" /> <mass value="0.296315811300368" /> <inertia ixx="0.000374692013709393" ixy="-9.17172260383823E-08" ixz="-2.43187512356516E-12" iyy="0.000661029987747155" iyz="1.9736939507106E-13" izz="0.000374691963930348" /> </inertial> <visual> <geometry> <cylinder length="0.001" radius="0.005"/> </geometry> <origin rpy="0 0 0" xyz="0 0 0" /> <material name=""> <color rgba="0.792156862745098 0.819607843137255 0.933333333333333 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <cylinder length="0.001" radius="0.005"/> </geometry> </collision> </link> <joint name="front_steer_right_joint" type="revolute"> <origin rpy="0 0 0" xyz="0.17 -0.21 0.102" /> <parent link="base_link" /> <child link="front_steer_right_link" /> <axis xyz="0 0 1" /> <!-- charge steer direction default is 0 0 1--> <limit lower="-0.69" upper="0.69" effort="0" velocity="0" /> </joint> <!-- ************************************************************************************* --> <link name="front_right_wheel_link"> <inertial> <origin xyz="9.44636555644252E-08 -0.000295273745285485 -8.13046296954667E-11" rpy="0 0 0" /> <mass value="0.296315811300368" /> <inertia ixx="0.000374692013709393" ixy="-9.17172260383823E-08" ixz="-2.43187512356516E-12" iyy="0.000661029987747155" iyz="1.9736939507106E-13" izz="0.000374691963930348" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/front_right_wheel_link.STL" /> </geometry> <material name=""> <color rgba="0.792156862745098 0.819607843137255 0.933333333333333 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/front_right_wheel_link.STL" /> </geometry> </collision> </link> <joint name="front_right_wheel_joint" type="continuous"> <origin xyz="0 0 -0.06" rpy="0 0 0" /> <!-- amend the position between steer_right_link and front right wheel--> <parent link="front_steer_right_link" /> <child link="front_right_wheel_link" /> <axis xyz="0 1 0" /> </joint> <!-- In order to fit ackermann simulation plugins's request,amend the front steer link and it's joint --> <link name="front_steer_left_link"> <!-- remember add inertial label,if not,and it can't visual on gazebo--> <inertial> <origin xyz="9.44636555644252E-08 -0.000295273745285485 -8.13046296954667E-11" rpy="0 0 0" /> <mass value="0.296315811300368" /> <inertia ixx="0.000374692013709393" ixy="-9.17172260383823E-08" ixz="-2.43187512356516E-12" iyy="0.000661029987747155" iyz="1.9736939507106E-13" izz="0.000374691963930348" /> </inertial> <visual> <geometry> <cylinder length="0.001" radius="0.005"/> </geometry> <origin rpy="0 0 0" xyz="0 0 0" /> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <cylinder length="0.001" radius="0.005"/> </geometry> </collision> </link> <joint name="front_steer_left_joint" type="revolute"> <origin rpy="0 0 0" xyz="0.17 0.21 0.102" /> <parent link="base_link" /> <child link="front_steer_left_link" /> <axis xyz="0 0 1" /> <!-- charge steer direction default is 0 0 1--> <limit lower="-0.69" upper="0.69" effort="0" velocity="0" /> </joint> <!-- ************************************************************************************* --> <link name="front_left_wheel_link"> <inertial> <origin xyz="-3.99413835339146E-11 0.000295273997845347 1.08602016268833E-10" rpy="0 0 0" /> <mass value="0.296315811293944" /> <inertia ixx="0.00037469197851121" ixy="-1.84493877596723E-13" ixz="-9.50756757097929E-12" iyy="0.00066103001709398" iyz="-1.17866882205563E-13" izz="0.000374691969713977" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/front_left_wheel_link.STL" /> </geometry> <material name=""> <color rgba="0.792156862745098 0.819607843137255 0.933333333333333 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/front_left_wheel_link.STL" /> </geometry> </collision> </link> <joint name="front_left_wheel_joint" type="continuous"> <origin xyz="0 0 -0.06" rpy="0 0 0" /> <!-- amend the position between steer_left_link and front left wheel--> <parent link="front_steer_left_link" /> <child link="front_left_wheel_link" /> <axis xyz="0 1 0" /> </joint> </robot>- 在gazebo中驱动小车的urdf文件
<?xml version="1.0" encoding="utf-8"?> <!-- This URDF was automatically created by SolidWorks to URDF Exporter! Originally created by Stephen Brawner (brawner@gmail.com) Commit Version: 1.5.1-0-g916b5db Build Version: 1.5.7152.31018 For more information, please see http://wiki.ros.org/sw_urdf_exporter --> <robot name="neor_mini"> <!-- Add Gazebo plugins --> <!-- Load ros_control plugin using the steer_bot_hardware_gazebo implementation of the hardware_interface::RobotHW --> <gazebo> <plugin name="gazebo_ros_control" filename="libgazebo_ros_control.so"> <robotSimType>steer_bot_hardware_gazebo/SteerBotHardwareGazebo</robotSimType> <legacyModeNS>false</legacyModeNS> </plugin> </gazebo> <link name="base_link"> <!-- avoid root link inertia warnings, annotation --> <inertial> <origin xyz="0.030649671440691 -1.79069899872708E-05 0.0558717976709459" rpy="0 0 0" /> <mass value="1.72617713171385" /> <inertia ixx="0.0107311274569357" ixy="-3.24164649120244E-08" ixz="0.00169188715816868" iyy="0.0198871551919603" iyz="2.40252669081509E-07" izz="0.0269841937242323" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/base_link.dae" /> </geometry> <material name=""> <color rgba="0.250980392156863 0.250980392156863 0.250980392156863 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/base_link.STL" /> </geometry> </collision> </link> <link name="rear_wheel_link"> <inertial> <origin xyz="-8.88178419700125E-16 -2.05391259555654E-14 -0.00112500000001892" rpy="0 0 0" /> <mass value="5.65486677646169E-05" /> <inertia ixx="1.32005796313028E-10" ixy="-1.938704560671E-27" ixz="2.13770572261755E-26" iyy="1.32005796313028E-10" iyz="-7.60216295195271E-25" izz="2.03575203952622E-10" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/rear_wheel_link.STL" /> </geometry> <material name=""> <color rgba="0.274509803921569 1 0.247058823529412 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/rear_wheel_link.STL" /> </geometry> </collision> </link> <joint name="rear_wheel_joint" type="continuous"> <origin xyz="-0.181499999999597 0 0.0399999999987674" rpy="0 0 0" /> <parent link="base_link" /> <child link="rear_wheel_link" /> <axis xyz="0 1 0" /> </joint> <link name="left_rear_link"> <inertial> <origin xyz="7.85229659072684E-11 -0.0196762547002777 4.85059770127805E-11" rpy="0 0 0" /> <mass value="0.29556182905038" /> <inertia ixx="0.000374087423652291" ixy="2.19336154342606E-13" ixz="-5.50404301757561E-12" iyy="0.000661017199375587" iyz="-5.10049385981967E-14" izz="0.000374087441459994" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/left_rear_link.STL" /> </geometry> <material name=""> <color rgba="0.792156862745098 0.819607843137255 0.933333333333333 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/left_rear_link.STL" /> </geometry> </collision> </link> <joint name="left_rear_joint" type="continuous"> <origin xyz="-0.181499999999595 0.228542434993694 0.0399999999991634" rpy="0 0 0" /> <parent link="base_link" /> <child link="left_rear_link" /> <axis xyz="0 1 0" /> <limit lower="-3.14" upper="3.14" effort="0" velocity="0" /> </joint> <link name="right_rear_link"> <inertial> <origin xyz="7.8521189550429E-11 0.0196762545376323 3.35983463273237E-11" rpy="0 0 0" /> <mass value="0.295561829050389" /> <inertia ixx="0.000374087423652306" ixy="-2.1933774523493E-13" ixz="5.50404145624456E-12" iyy="0.000661017199375601" iyz="-5.10073974604221E-14" izz="0.000374087441459995" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/right_rear_link.STL" /> </geometry> <material name=""> <color rgba="0.792156862745098 0.819607843137255 0.933333333333333 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/right_rear_link.STL" /> </geometry> </collision> </link> <joint name="right_rear_joint" type="continuous"> <origin xyz="-0.181499999999595 -0.228542434994426 0.0399999999991584" rpy="0 0 0" /> <parent link="base_link" /> <child link="right_rear_link" /> <axis xyz="0 1 0" /> <limit lower="-3.14" upper="3.14" effort="0" velocity="0" /> </joint> <link name="front_steer_link"> <inertial> <origin xyz="-2.1316282072803E-14 3.67778030252452E-11 -0.00112486602459905" rpy="0 0 0" /> <mass value="5.65486677646163E-05" /> <inertia ixx="1.32005796313026E-10" ixy="1.16322273640277E-26" ixz="1.20446157864484E-28" iyy="1.32005796313026E-10" iyz="-8.66481261175625E-27" izz="2.03575203952619E-10" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/front_steer_link.STL" /> </geometry> <material name=""> <color rgba="0.274509803921569 1 0.247058823529412 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/front_steer_link.STL" /> </geometry> </collision> </link> <joint name="front_steer_joint" type="revolute"> <origin xyz="0.172883370897628 0 -0.00376561854722868" rpy="0 0 0" /> <parent link="base_link" /> <child link="front_steer_link" /> <axis xyz="0 0 1" /> <limit lower="-0.72" upper="0.72" effort="0" velocity="0" /> </joint> <!-- In order to fit ackermann simulation plugins's request,amend the front steer link and it's joint --> <link name="front_steer_right_link"> <!-- remember add inertial label,if not,and it can't visual on gazebo--> <inertial> <origin xyz="9.44636555644252E-08 -0.000295273745285485 -8.13046296954667E-11" rpy="0 0 0" /> <mass value="0.296315811300368" /> <inertia ixx="0.000374692013709393" ixy="-9.17172260383823E-08" ixz="-2.43187512356516E-12" iyy="0.000661029987747155" iyz="1.9736939507106E-13" izz="0.000374691963930348" /> </inertial> <visual> <geometry> <cylinder length="0.001" radius="0.005"/> </geometry> <origin rpy="0 0 0" xyz="0 0 0" /> <material name=""> <color rgba="0.792156862745098 0.819607843137255 0.933333333333333 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <cylinder length="0.001" radius="0.005"/> </geometry> </collision> </link> <joint name="front_steer_right_joint" type="revolute"> <origin rpy="0 0 0" xyz="0.17 -0.21 0.102" /> <parent link="base_link" /> <child link="front_steer_right_link" /> <axis xyz="0 0 1" /> <!-- charge steer direction default is 0 0 1--> <limit lower="-0.69" upper="0.69" effort="0" velocity="0" /> </joint> <!-- ************************************************************************************* --> <link name="front_right_wheel_link"> <inertial> <origin xyz="9.44636555644252E-08 -0.000295273745285485 -8.13046296954667E-11" rpy="0 0 0" /> <mass value="0.296315811300368" /> <inertia ixx="0.000374692013709393" ixy="-9.17172260383823E-08" ixz="-2.43187512356516E-12" iyy="0.000661029987747155" iyz="1.9736939507106E-13" izz="0.000374691963930348" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/front_right_wheel_link.STL" /> </geometry> <material name=""> <color rgba="0.792156862745098 0.819607843137255 0.933333333333333 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/front_right_wheel_link.STL" /> </geometry> </collision> </link> <joint name="front_right_wheel_joint" type="continuous"> <origin xyz="0 0 -0.06" rpy="0 0 0" /> <!-- amend the position between steer_right_link and front right wheel--> <parent link="front_steer_right_link" /> <child link="front_right_wheel_link" /> <axis xyz="0 1 0" /> </joint> <!-- In order to fit ackermann simulation plugins's request,amend the front steer link and it's joint --> <link name="front_steer_left_link"> <!-- remember add inertial label,if not,and it can't visual on gazebo--> <inertial> <origin xyz="9.44636555644252E-08 -0.000295273745285485 -8.13046296954667E-11" rpy="0 0 0" /> <mass value="0.296315811300368" /> <inertia ixx="0.000374692013709393" ixy="-9.17172260383823E-08" ixz="-2.43187512356516E-12" iyy="0.000661029987747155" iyz="1.9736939507106E-13" izz="0.000374691963930348" /> </inertial> <visual> <geometry> <cylinder length="0.001" radius="0.005"/> </geometry> <origin rpy="0 0 0" xyz="0 0 0" /> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <cylinder length="0.001" radius="0.005"/> </geometry> </collision> </link> <joint name="front_steer_left_joint" type="revolute"> <origin rpy="0 0 0" xyz="0.17 0.21 0.102" /> <parent link="base_link" /> <child link="front_steer_left_link" /> <axis xyz="0 0 1" /> <!-- charge steer direction default is 0 0 1--> <limit lower="-0.69" upper="0.69" effort="0" velocity="0" /> </joint> <!-- ************************************************************************************* --> <link name="front_left_wheel_link"> <inertial> <origin xyz="-3.99413835339146E-11 0.000295273997845347 1.08602016268833E-10" rpy="0 0 0" /> <mass value="0.296315811293944" /> <inertia ixx="0.00037469197851121" ixy="-1.84493877596723E-13" ixz="-9.50756757097929E-12" iyy="0.00066103001709398" iyz="-1.17866882205563E-13" izz="0.000374691969713977" /> </inertial> <visual> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/front_left_wheel_link.STL" /> </geometry> <material name=""> <color rgba="0.792156862745098 0.819607843137255 0.933333333333333 1" /> </material> </visual> <collision> <origin xyz="0 0 0" rpy="0 0 0" /> <geometry> <mesh filename="package://neor_mini/meshes/front_left_wheel_link.STL" /> </geometry> </collision> </link> <joint name="front_left_wheel_joint" type="continuous"> <origin xyz="0 0 -0.06" rpy="0 0 0" /> <!-- amend the position between steer_left_link and front left wheel--> <parent link="front_steer_left_link" /> <child link="front_left_wheel_link" /> <axis xyz="0 1 0" /> </joint> </robot>- launch文件
<launch> <param name="robot_description" textfile="$(find neor_mini)/urdf/neor_mini.urdf" /> <node name="joint_state_publisher_gui" pkg="joint_state_publisher_gui" type="joint_state_publisher_gui" /> <node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" /> <node name="rviz" pkg="rviz" type="rviz" args="-d $(find neor_mini)/rviz/neor_mini_rviz.rviz" /> </launch> -