紧急通知:禁止一切关于政治&VPN翻墙等话题,发现相关帖子会立马删除封号
小鱼 ROS 2 新书上线!点击链接查看, 新书配套视频点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
小鱼 ROS 2 新书上线!点击链接查看, 新书配套视频点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
rviz2中moveit2拖动机械臂,可以plan成功,但execute失败
-
给一个random valid可以双臂同时plan,如图
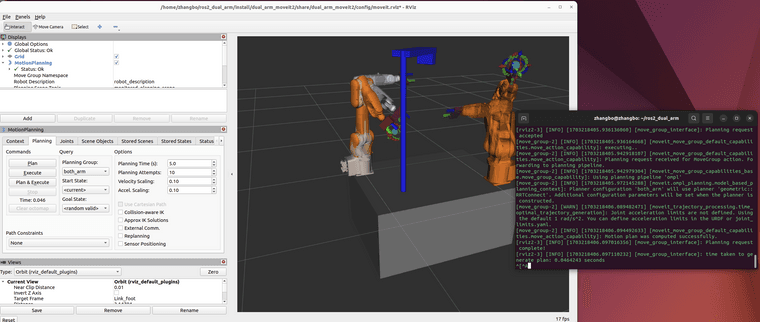
但是execute就会failed,并在终端报错

dem.launch.py终端报的错误:^[^A[move_group-2] [INFO] [1703218500.913052710] [moveit_move_group_default_capabilities.execute_trajectory_action_capability]: Received goal request [move_group-2] [INFO] [1703218500.913192143] [moveit_move_group_default_capabilities.execute_trajectory_action_capability]: Execution request received [move_group-2] [INFO] [1703218500.913222817] [moveit.plugins.moveit_simple_controller_manager]: Returned 3 controllers in list [move_group-2] [INFO] [1703218500.913240701] [moveit.plugins.moveit_simple_controller_manager]: Returned 3 controllers in list [move_group-2] [INFO] [1703218500.913378881] [moveit_ros.trajectory_execution_manager]: Validating trajectory with allowed_start_tolerance 0.01 [rviz2-3] [INFO] [1703218500.913401387] [move_group_interface]: Execute request accepted [move_group-2] [INFO] [1703218500.925083896] [moveit_ros.trajectory_execution_manager]: Starting trajectory execution ... [move_group-2] [INFO] [1703218500.925148678] [moveit.plugins.moveit_simple_controller_manager]: Returned 3 controllers in list [move_group-2] [INFO] [1703218500.925167605] [moveit.plugins.moveit_simple_controller_manager]: Returned 3 controllers in list [move_group-2] [INFO] [1703218500.925312143] [moveit.simple_controller_manager.follow_joint_trajectory_controller_handle]: sending trajectory to both_arm_controller [ros2_control_node-4] [INFO] [1703218500.926323249] [both_arm_controller]: Received new action goal [ros2_control_node-4] [ERROR] [1703218500.926366066] [both_arm_controller]: Can't accept new action goals. Controller is not running. [move_group-2] [INFO] [1703218500.926743757] [moveit.simple_controller_manager.follow_joint_trajectory_controller_handle]: both_arm_controller started execution [move_group-2] [WARN] [1703218500.926764652] [moveit.simple_controller_manager.follow_joint_trajectory_controller_handle]: Goal request rejected [move_group-2] [ERROR] [1703218500.926809530] [moveit.simple_controller_manager.follow_joint_trajectory_controller_handle]: Goal was rejected by server [move_group-2] [ERROR] [1703218500.926848912] [moveit_ros.trajectory_execution_manager]: Failed to send trajectory part 1 of 1 to controller both_arm_controller [move_group-2] [INFO] [1703218500.926859542] [moveit_ros.trajectory_execution_manager]: Completed trajectory execution with status ABORTED ... [move_group-2] [INFO] [1703218500.926960830] [moveit_move_group_default_capabilities.execute_trajectory_action_capability]: Execution completed: ABORTED [rviz2-3] [INFO] [1703218500.927282137] [move_group_interface]: Execute request aborted [rviz2-3] [ERROR] [1703218500.927343873] [move_group_interface]: MoveGroupInterface::execute() failed or timeout reached另外左右两个单臂分别进行规划和执行完全没问题
-
@zhang_bo7 兄弟解决了吗,我也遇到同样的问题,我是用的abb_ros2功能包,运行它的示例后启动了RVIZ2和moveit2,但是只能拖动和规划路径,不能执行,如果解决了能帮帮我吗?
[move_group-1] [INFO] [1712247960.914323561] [moveit_move_group_default_capabilities.move_action_capability]: Motion plan was computed successfully. [rviz2-2] [INFO] [1712247960.915097763] [move_group_interface]: Planning request complete! [rviz2-2] [INFO] [1712247960.915737028] [move_group_interface]: time taken to generate plan: 0.014175 seconds [move_group-1] [INFO] [1712247961.221665902] [moveit_move_group_default_capabilities.execute_trajectory_action_capability]: Received goal request [move_group-1] [INFO] [1712247961.221836082] [moveit_move_group_default_capabilities.execute_trajectory_action_capability]: Execution request received [move_group-1] [INFO] [1712247961.221881266] [moveit.plugins.moveit_simple_controller_manager]: Returned 1 controllers in list [move_group-1] [INFO] [1712247961.221921081] [moveit.plugins.moveit_simple_controller_manager]: Returned 1 controllers in list [move_group-1] [INFO] [1712247961.222060358] [moveit_ros.trajectory_execution_manager]: Validating trajectory with allowed_start_tolerance 0.01 [rviz2-2] [INFO] [1712247961.221939824] [move_group_interface]: Execute request accepted [move_group-1] [INFO] [1712247961.225794705] [moveit_ros.trajectory_execution_manager]: Starting trajectory execution ... [move_group-1] [INFO] [1712247961.225842497] [moveit.plugins.moveit_simple_controller_manager]: Returned 1 controllers in list [move_group-1] [INFO] [1712247961.225860506] [moveit.plugins.moveit_simple_controller_manager]: Returned 1 controllers in list [move_group-1] [INFO] [1712247961.225975151] [moveit.simple_controller_manager.follow_joint_trajectory_controller_handle]: sending trajectory to joint_trajectory_controller [move_group-1] [INFO] [1712247961.226572901] [moveit.simple_controller_manager.follow_joint_trajectory_controller_handle]: joint_trajectory_controller started execution [move_group-1] [WARN] [1712247961.226620574] [moveit.simple_controller_manager.follow_joint_trajectory_controller_handle]: Goal request rejected [move_group-1] [ERROR] [1712247961.226580212] [moveit.simple_controller_manager.follow_joint_trajectory_controller_handle]: Goal was rejected by server [move_group-1] [ERROR] [1712247961.226685663] [moveit_ros.trajectory_execution_manager]: Failed to send trajectory part 1 of 1 to controller joint_trajectory_controller [move_group-1] [INFO] [1712247961.226700793] [moveit_ros.trajectory_execution_manager]: Completed trajectory execution with status ABORTED ... [move_group-1] [INFO] [1712247961.226793010] [moveit_move_group_default_capabilities.execute_trajectory_action_capability]: Execution completed: ABORTED [rviz2-2] [INFO] [1712247961.227207177] [move_group_interface]: Execute request aborted [rviz2-2] [ERROR] [1712247961.228038253] [move_group_interface]: MoveGroupInterface::execute() failed or timeout reached