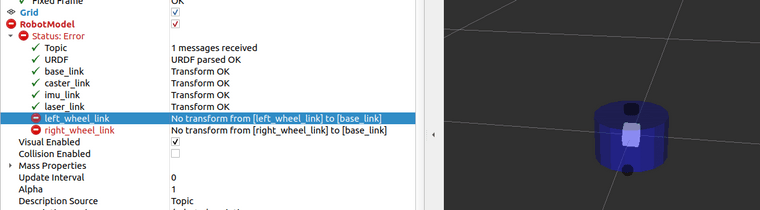
按照https://github.com/fishros/fishbot步骤下载编译后rviz2显示的机器人模型缺少左右轮
-
-
此回复已被删除! -
已解决,原因是源码中display_rviz2.launch.py中的joint_state_publisher_gui屏蔽了,打开重新编译可以了
-
1 1124113453 将这个主题转为问答主题,在
-
1 1124113453 将这个主题转为普通主题,在