虚拟环境下ros手眼标定无法aruco_single/result显示二维码的坐标系
-
1、安装了aruco_ros包
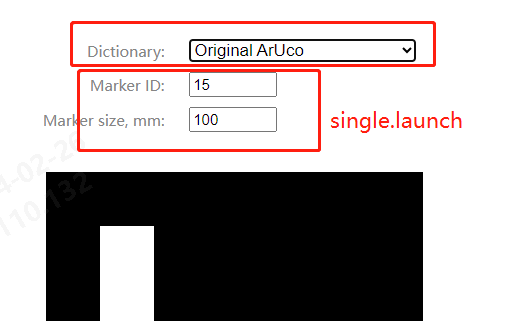
修改single.launch文件<launch> <arg name="markerId" default="36"/> <arg name="markerSize" default="0.1"/> <!-- in m --> <arg name="eye" default="left"/> <arg name="marker_frame" default="aruco_marker_frame"/> <arg name="ref_frame" default=""/> <!-- leave empty and the pose will be published wrt param parent_name --> <arg name="corner_refinement" default="LINES" /> <!-- NONE, HARRIS, LINES, SUBPIX --> <node pkg="aruco_ros" type="single" name="aruco_single"> <remap from="/camera_info" to="/camera/color/camera_info" /> <remap from="/image" to="/camera/color/image_raw" /> <param name="image_is_rectified" value="True"/> <param name="marker_size" value="$(arg markerSize)"/> <param name="marker_id" value="$(arg markerId)"/> <param name="reference_frame" value="$(arg ref_frame)"/> <!-- frame in which the marker pose will be refered --> <param name="camera_frame" value="camera_link"/> <param name="marker_frame" value="$(arg marker_frame)" /> <param name="corner_refinement" value="$(arg corner_refinement)" /> </node> </launch>(是不是markerId和markerSize有问题?我是根据这个网址)生成的ID设置的。
2、安装了moveit_calibrition手眼标定包
3、运行:roslaunch xxxmoveit_config demo_gazebo.launch,rviz和gazebo可以正常打开并运行
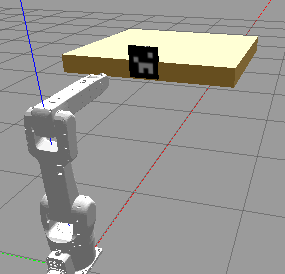
gazebo中插入一个带有aruco码的模型
4、运行:roslaunch aruco_ros demo.launch
rosrun image_view image_view image:=/aruco_single/result

画面没有显示码的坐标系? -
@767015514 解决了,aruco码应该选用original aruco

-
7 767015514 将这个主题标记为已解决,在