四驱板无法转为串口通讯microROS模式
-
之前使用reset就会转换,现在不知道为什么就不行了。使用的是四驱板的代码
串口一直返回这个[ 12547][E][WiFiUdp.cpp:185] endPacket(): could not send data: 118 [ 13159][E][WiFiUdp.cpp:185] endPacket(): could not send data: 118 [ 13771][E][WiFiUdp.cpp:185] endPacket(): could not send data: 118我将默认模式改为```
#define CONFIG_DEFAULT_TRANSPORT_MODE "serial"也不行。
按reset的时候会返回rst:0x1 (POWERON_RESET),boot:0x13 (SPI_FAST_FLASH_BOOT) configsip: 0, SPIWP:0xee clk_drv:0x00,q_drv:0x00,d_drv:0x00,cs0_drv:0x00,hd_drv:0x00,wp_drv:0x00 mode:DIO, clock div:1 load:0x3fff0030,len:1184 load:0x40078000,len:13260 load:0x40080400,len:3028 entry 0x400805e4 [35]@51>D:first_startup=0 ================================================= wwww.fishros.com fishbot-motion-control-v1.0.0 ================================================= [46]@51>D:first_startup=0 $first_startup=0 $serial_baud=921600 $wifi_ssid=oneKM $wifi_pswd=88888888 $wifi_ap_ssid=FISHBOT_6FE0 $wifi_ap_pswd= $microros_mode=udp_client $udpserver_ip=192.168.4.134 $udpserver_port=8888 $ros2_nodename=fishbot_motion_control $ros2_namespace= $odom_topic=odom $odom_frameid=odom $twist_topic=cmd_vel $odom_pub_period=50 $reducate_ration=45 $pulse_ration=44 $wheel_diameter=48 $wheel_distance=150.00 $pid_kp=0.62 $pid_ki=0.13 $pid_kd=0.00 $pid_outlimit=100.00 $board=motion_board $version=v1.1.0感觉我改的参数都没传上去
-
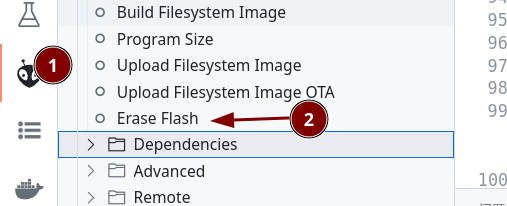
@2429148505 参数可以通过配置助手进行配置($microros_mode=serial),另外切换模式是双击BOOT,并非是按RST,直接改源码请先清除原有flash的内容(配置是掉电保存的,所以直接刷源码一般无法清除)
-
@小鱼 那么怎么清除flash呢
-