如何设置SLAM建图时的激光数据来源
-
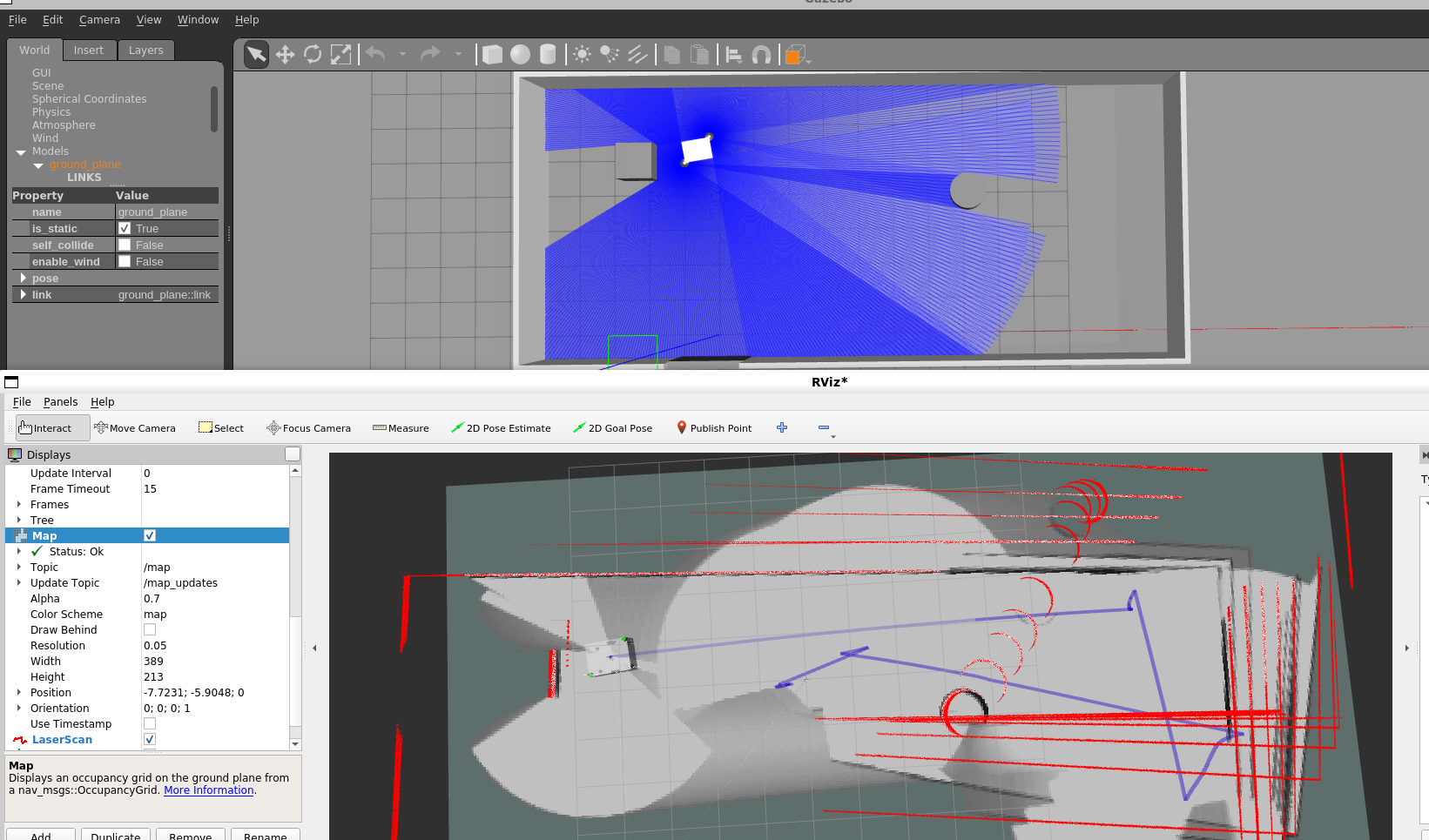
hi鱼总,我在给机器人建模的时候用了两个激光,但是在建图的过程种出现如图所示的结果。我想是不是没有配置好建图时候的激光数据来源。想请问一下这个应该怎么来配置。
-
@1058898985 后来不是检查到了小车在原地还会动,应该是你的建模有问题,检查下。
-
@小鱼 谢谢,目前在定位建模的问题到底出在哪儿。我调用您例程里的URDF文件车不会动。但是调用我自己的模型就会以一个很小的速度动。
-
@1058898985 你可以试试我的代码能不能跑,可以跑就仔细对比下URDF。
fishbot地址:https://github.com/fishros/fishbot
-
@小鱼 鱼总,调用你的模型文件没有问题。但是我的就不行。我找了好几天了,没定位到问题。帮忙看看我的URDF
<?xml version="1.0"?>
<robot name="fishbot"><!-- Robot Footprint -->
<link name="base_footprint"/><joint name="base_joint" type="fixed">
<parent link="base_footprint"/>
<child link="base_link"/>
<origin xyz="0.0 0.0 0.19" rpy="0 0 0"/>
</joint><!-- base link -->
<link name="base_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<box size="0.9 0.7 0.3"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<box size="0.9 0.7 0.3"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.0122666" ixy="0" ixz="0" iyy="0.0122666" iyz="0" izz="0.02"/>
</inertial>
</link><!-- head left laser link -->
<link name="head_left_laser_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.10" radius="0.04"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual><collision> <origin xyz="0 0 0" rpy="0 0 0"/> <geometry> <cylinder length="0.10" radius="0.04"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </collision> <inertial> <mass value="0.1"/> <inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/> </inertial></link>
<!-- head left laser joint -->
<joint name="head_left_laser_joint" type="fixed">
<parent link="base_link" />
<child link="head_left_laser_link" />
<origin xyz="0.40 0.30 0.175" />
</joint><!-- end right laser link -->
<link name="end_right_laser_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<cylinder length="0.10" radius="0.04"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual><collision> <origin xyz="0 0 0" rpy="0 0 0"/> <geometry> <cylinder length="0.10" radius="0.04"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </collision> <inertial> <mass value="0.1"/> <inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/> </inertial></link>
<!-- end right laser joint -->
<joint name="end_right_laser_joint" type="fixed">
<parent link="base_link" />
<child link="end_right_laser_link" />
<origin xyz="-0.40 -0.30 0.175" />
</joint><!-- imu link -->
<link name="imu_link">
<visual>
<origin xyz="0 0 0.0" rpy="0 0 0"/>
<geometry>
<box size="0.02 0.02 0.02"/>
</geometry>
</visual><collision> <origin xyz="0 0 0.0" rpy="0 0 0"/> <geometry> <box size="0.02 0.02 0.02"/> </geometry> </collision> <inertial> <mass value="0.1"/> <inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/> </inertial></link>
<!-- imu joint -->
<joint name="imu_joint" type="fixed">
<parent link="base_link" />
<child link="imu_link" />
<origin xyz="0 0 0.1" />
</joint><!-- left wheel link -->
<link name="left_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.08"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual><collision> <origin xyz="0 0 0" rpy="1.57079 0 0"/> <geometry> <cylinder length="0.04" radius="0.08"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </collision> <inertial> <mass value="0.2"/> <inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/> </inertial></link>
<!-- left wheel joint -->
<joint name="left_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="left_wheel_link" />
<origin xyz="0 0.33 -0.11" />
<axis xyz="0 1 0" />
</joint><!-- right wheel link -->
<link name="right_wheel_link">
<visual>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.08"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="1.57079 0 0"/>
<geometry>
<cylinder length="0.04" radius="0.08"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.2"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link><!-- right wheel joint -->
<joint name="right_wheel_joint" type="continuous">
<parent link="base_link" />
<child link="right_wheel_link" />
<origin xyz="0 -0.33 -0.11" />
<axis xyz="0 1 0" />
</joint><!-- caster head left wheel link -->
<link name="caster_head_left_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.04"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual>
<collision>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.04"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</collision>
<inertial>
<mass value="0.02"/>
<inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/>
</inertial>
</link><!-- caster head left wheel joint -->
<joint name="caster_head_left_joint" type="fixed">
<parent link="base_link" />
<child link="caster_head_left_link" />
<origin xyz="0.37 0.275 -0.15" />
</joint><!--caster head left wheel gazebo -->>
<gazebo reference="caster_head_left_link">
<material>Gazebo/Black</material>
</gazebo><gazebo reference="caster_head_left_link">
<mu1 value="0.0"/>
<mu2 value="0.0"/>
<kp value="1000000.0" />
<kd value="10.0" />
<!-- <fdir1 value="0 0 1"/> -->
</gazebo><!-- caster head right wheel link -->
<link name="caster_head_right_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.04"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual><collision> <origin xyz="0 0 0" rpy="0 0 0"/> <geometry> <sphere radius="0.04"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </collision> <inertial> <mass value="0.02"/> <inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/> </inertial></link>
<!-- caster head right wheel joint -->
<joint name="caster_head_right_joint" type="fixed">
<parent link="base_link" />
<child link="caster_head_right_link" />
<origin xyz="0.37 -0.275 -0.15" />
</joint><!--caster head right wheel gazebo -->>
<gazebo reference="caster_head_right_link">
<material>Gazebo/Black</material>
</gazebo><gazebo reference="caster_head_right_link">
<mu1 value="0.0"/>
<mu2 value="0.0"/>
<kp value="1000000.0" />
<kd value="10.0" />
<!-- <fdir1 value="0 0 1"/> -->
</gazebo><!-- caster end left wheel link -->
<link name="caster_end_left_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.04"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual><collision> <origin xyz="0 0 0" rpy="0 0 0"/> <geometry> <sphere radius="0.04"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </collision> <inertial> <mass value="0.02"/> <inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/> </inertial></link>
<!-- caster end left wheel joint -->
<joint name="caster_end_left_joint" type="fixed">
<parent link="base_link" />
<child link="caster_end_left_link" />
<origin xyz="-0.37 0.275 -0.15" />
</joint><!--caster end left wheel gazebo -->>
<gazebo reference="caster_end_left_link">
<material>Gazebo/Black</material>
</gazebo><gazebo reference="caster_end_left_link">
<mu1 value="0.0"/>
<mu2 value="0.0"/>
<kp value="1000000.0" />
<kd value="10.0" />
<!-- <fdir1 value="0 0 1"/> -->
</gazebo><!-- caster end right wheel link -->
<link name="caster_end_right_link">
<visual>
<origin xyz="0 0 0" rpy="0 0 0"/>
<geometry>
<sphere radius="0.04"/>
</geometry>
<material name="black">
<color rgba="0.0 0.0 0.0 0.5" />
</material>
</visual><collision> <origin xyz="0 0 0" rpy="0 0 0"/> <geometry> <sphere radius="0.04"/> </geometry> <material name="black"> <color rgba="0.0 0.0 0.0 0.5" /> </material> </collision> <inertial> <mass value="0.02"/> <inertia ixx="0.000190416666667" ixy="0" ixz="0" iyy="0.0001904" iyz="0" izz="0.00036"/> </inertial></link>
<!-- caster end right wheel joint -->
<joint name="caster_end_right_joint" type="fixed">
<parent link="base_link" />
<child link="caster_end_right_link" />
<origin xyz="-0.37 -0.275 -0.15" />
</joint><!--caster end right wheel gazebo -->>
<gazebo reference="caster_end_right_link">
<material>Gazebo/Black</material>
</gazebo><gazebo reference="caster_end_right_link">
<mu1 value="0.0"/>
<mu2 value="0.0"/>
<kp value="1000000.0" />
<kd value="10.0" />
<!-- <fdir1 value="0 0 1"/> -->
</gazebo><gazebo>
<plugin name='diff_drive' filename='libgazebo_ros_diff_drive.so'>
<ros>
<namespace>/</namespace>
<remapping>cmd_vel:=cmd_vel</remapping>
<remapping>odom:=odom</remapping>
</ros>
<update_rate>30</update_rate>
<!-- wheels -->
<left_joint>left_wheel_joint</left_joint>
<right_joint>right_wheel_joint</right_joint>
<!-- kinematics -->
<wheel_separation>0.66</wheel_separation>
<wheel_diameter>0.16</wheel_diameter>
<!-- limits -->
<max_wheel_torque>20</max_wheel_torque>
<max_wheel_acceleration>1.0</max_wheel_acceleration>
<!-- output -->
<publish_odom>true</publish_odom>
<publish_odom_tf>true</publish_odom_tf>
<publish_wheel_tf>true</publish_wheel_tf>
<odometry_frame>odom</odometry_frame>
<robot_base_frame>base_footprint</robot_base_frame>
</plugin><plugin name="fishbot_joint_state" filename="libgazebo_ros_joint_state_publisher.so"> <ros> <remapping>~/out:=joint_states</remapping> </ros> <update_rate>30</update_rate> <joint_name>right_wheel_joint</joint_name> <joint_name>left_wheel_joint</joint_name> </plugin></gazebo>
<gazebo reference="head_left_laser_link">
<material>Gazebo/Black</material>
</gazebo><gazebo reference="end_right_laser_link">
<material>Gazebo/Black</material>
</gazebo><gazebo reference="imu_link">
<sensor name="imu_sensor" type="imu">
<plugin filename="libgazebo_ros_imu_sensor.so" name="imu_plugin">
<ros>
<namespace>/</namespace>
<remapping>~/out:=imu</remapping>
</ros>
<initial_orientation_as_reference>false</initial_orientation_as_reference>
</plugin>
<always_on>true</always_on>
<update_rate>100</update_rate>
<visualize>true</visualize>
<imu>
<angular_velocity>
<x>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</x>
<y>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</y>
<z>
<noise type="gaussian">
<mean>0.0</mean>
<stddev>2e-4</stddev>
<bias_mean>0.0000075</bias_mean>
<bias_stddev>0.0000008</bias_stddev>
</noise>
</z>
</angular_velocity><linear_acceleration> <x> <noise type="gaussian"> <mean>0.0</mean> <stddev>1.7e-2</stddev> <bias_mean>0.1</bias_mean> <bias_stddev>0.001</bias_stddev> </noise> </x> <y> <noise type="gaussian"> <mean>0.0</mean> <stddev>1.7e-2</stddev> <bias_mean>0.1</bias_mean> <bias_stddev>0.001</bias_stddev> </noise> </y> <z> <noise type="gaussian"> <mean>0.0</mean> <stddev>1.7e-2</stddev> <bias_mean>0.1</bias_mean> <bias_stddev>0.001</bias_stddev> </noise> </z> </linear_acceleration> </imu> </sensor></gazebo>
<gazebo reference="head_left_laser_link">
<sensor name="head_left_laser_sensor" type="ray">
<always_on>true</always_on>
<visualize>true</visualize>
<update_rate>5</update_rate>
<pose>0 0 0.075 0 0 0</pose>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1.000000</resolution>
<min_angle>-1.570000</min_angle>
<max_angle>3.140000</max_angle>
</horizontal>
</scan>
<range>
<min>0.120000</min>
<max>20</max>
<resolution>0.015000</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray><plugin name="headleft_laserscan" filename="libgazebo_ros_ray_sensor.so"> <ros> <remapping>~/out:=scan</remapping> </ros> <output_type>sensor_msgs/LaserScan</output_type> <frame_name>head_left_laser_link</frame_name> </plugin> </sensor></gazebo>
<gazebo reference="end_right_laser_link">
<sensor name="end_right_laser_sensor" type="ray">
<always_on>true</always_on>
<visualize>true</visualize>
<update_rate>5</update_rate>
<pose>0 0 0.075 0 0 0</pose>
<ray>
<scan>
<horizontal>
<samples>360</samples>
<resolution>1.000000</resolution>
<min_angle>1.570000</min_angle>
<max_angle>6.280000</max_angle>
</horizontal>
</scan>
<range>
<min>0.120000</min>
<max>20</max>
<resolution>0.015000</resolution>
</range>
<noise>
<type>gaussian</type>
<mean>0.0</mean>
<stddev>0.01</stddev>
</noise>
</ray><plugin name="endright_laserscan" filename="libgazebo_ros_ray_sensor.so"> <ros> <remapping>~/out:=scan_end_right</remapping> </ros> <output_type>sensor_msgs/LaserScan</output_type> <frame_name>end_right_laser_link</frame_name> </plugin> </sensor></gazebo>
</robot>
-
@1058898985 注意格式哈,看下昨晚发的最新文章,检查平整性和惯性相关参数是否正常。
-
@小鱼修改了转动惯量,目前看不动了,但是左右驱动轮的joint还是在不停的跳动。
-
@1058898985 你的机器人模型数据是随便设的吗?惯量、质量、轮子半径之类的,位置是否正确
-
@小鱼 在 如何设置SLAM建图时的激光数据来源 中说:
@1058898985 你的机器人模型数据是随便设的吗?惯量、质量、轮子半径之类的,位置是否正确
外观数据正确,其他的数据我用solid work重新算一遍,几乎可以肯定就是这个问题。 -
@1058898985 惯量摩擦力之类的改改看