ros2 run error: Package not found
-
背景
我在尝试实现一个用python编写的ros2节点,用来进行目标检测,我所用的ros版本为ros-humble,ubuntu系统为22.04,这个项目实际不止包含这一个包,这里我仅仅展示这个出错的包,我认为这与其他包的关系不大
问题描述
节点实现完成后,使用colcon build进行编译,并尝试使用ros2 run进行运行,但是找不到package
具体细节
下面给出我具体的项目结构,package.xml、setup.cfg、setup.py文件内容,以及编译结果和运行结果
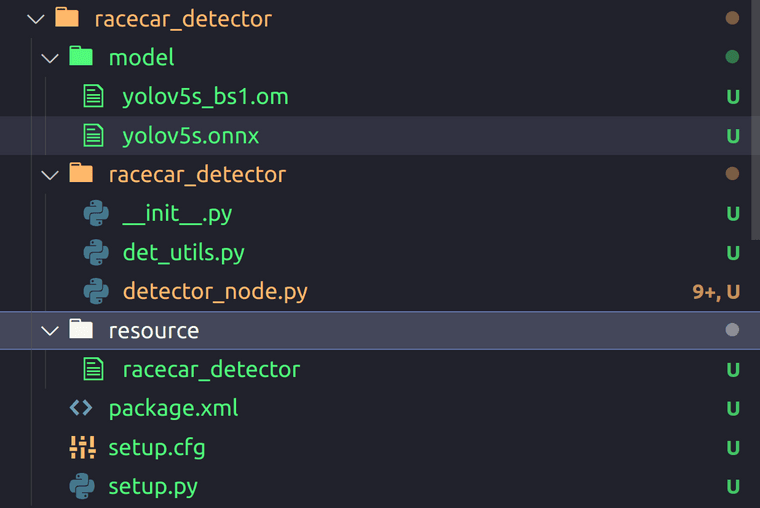
package.xml <?xml version="1.0"?> <?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?> <package format="3"> <name>racecar_detector</name> <version>0.0.0</version> <description>TODO: Package description</description> <maintainer email="3110379921@qq.com">labor</maintainer> <license>TODO: License declaration</license> <depend>rclpy</depend> <depend>sensor_msgs</denpend> <test_depend>ament_copyright</test_depend> <test_depend>ament_flake8</test_depend> <test_depend>ament_pep257</test_depend> <test_depend>python3-pytest</test_depend> <export> <build_type>ament_python</build_type> </export> </package>setup.py from setuptools import find_packages, setup package_name = 'racecar_detector' setup( name=package_name, version='0.0.0', packages=find_packages(exclude=['test']), data_files=[ ('share/ament_index/resource_index/packages', ['resource/' + package_name]), ('share/' + package_name, ['package.xml']), ('share/' + package_name + "/model", ['model/yolov5s_bs1.om', 'model/yolov5s.onnx']), ], install_requires=['setuptools'], zip_safe=True, maintainer='labor', maintainer_email='3110379921@qq.com', description='TODO: Package description', license='TODO: License declaration', tests_require=['pytest'], entry_points={ 'console_scripts': [ 'racecar_detector_node = racecar_detector.detector_node:main' ], }, )setup.cfg [develop] script_dir=$base/lib/racecar_detector [install] install_scripts=$base/lib/racecar_detector这里编译时报了一个setuptools的问题,但那应该无伤大雅
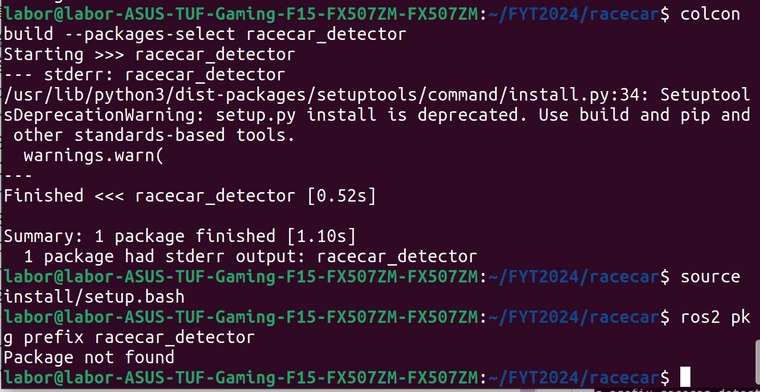
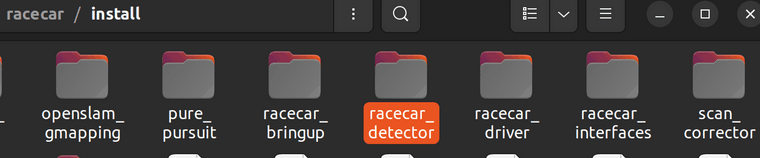
我按照ros2-humble官方wiki文档进行的节点内容编写,并不认为这里有什么问题,我确定自己已经source过install/setup.bash文件,并且经过检查,install下确实存在racecar_detector的包,其中lib文件夹下也已生成可执行文件
尝试过的解决办法
我在网上进行查阅,并没有找到很有效的办法,删除install build log 文件夹,重新编译,仍然报同样的错
-
@3110379921 我遇到了类似的问题,请问题主最后解决这个问题了吗?