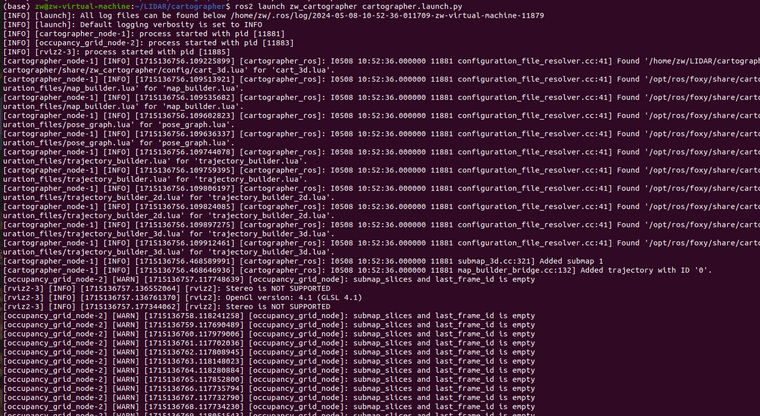
[occupancy_grid_node-2] [WARN] [1715136758.118241258] [occupancy_grid_node]: submap_slices and last_frame_id is empty
-
你好,我在Ubuntu20.04,ros2 foxy环境下运行纯激光雷达ros2bag,激光雷达的topic是/vanjee_points719c。在采用教程中的方法运行出现了如下图的报错:
这里提供下相关文件:
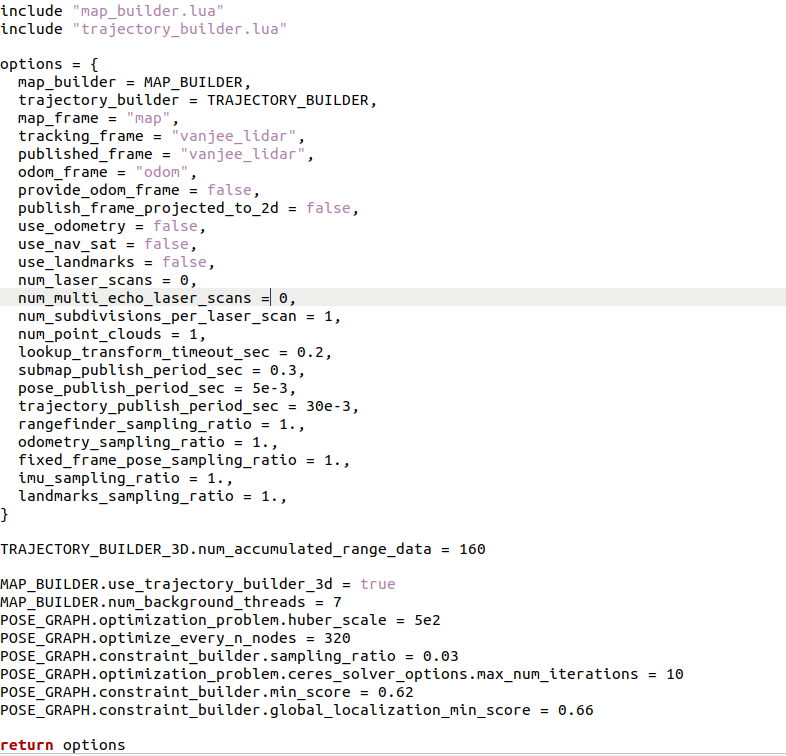
cart_3d.lua:
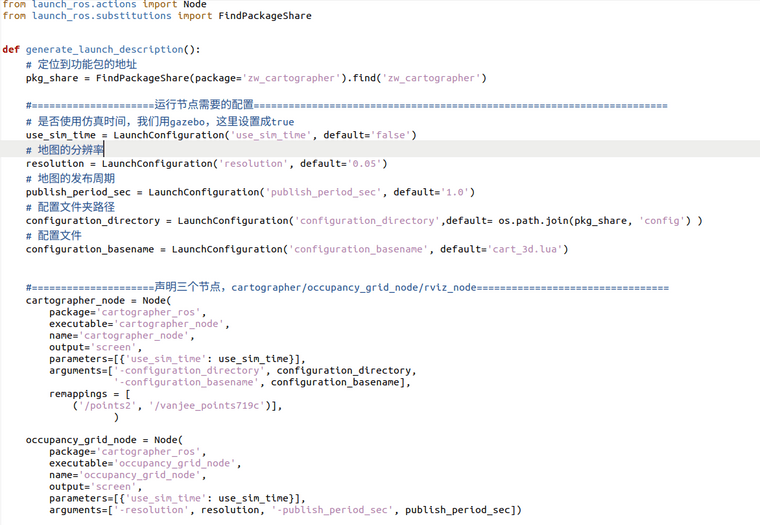
cartographer.launch.py:
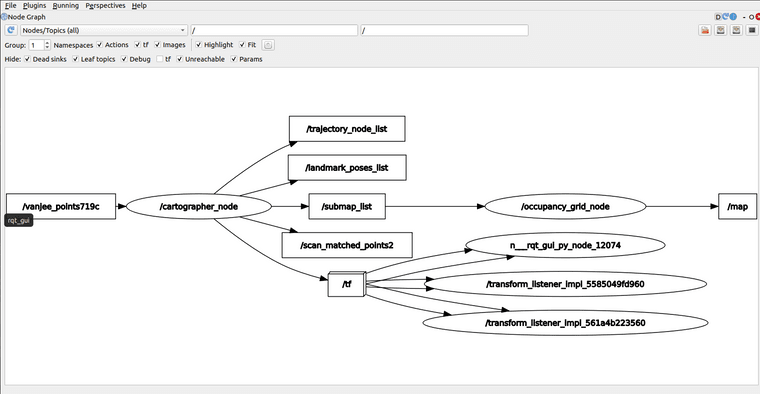
rqt_gui:
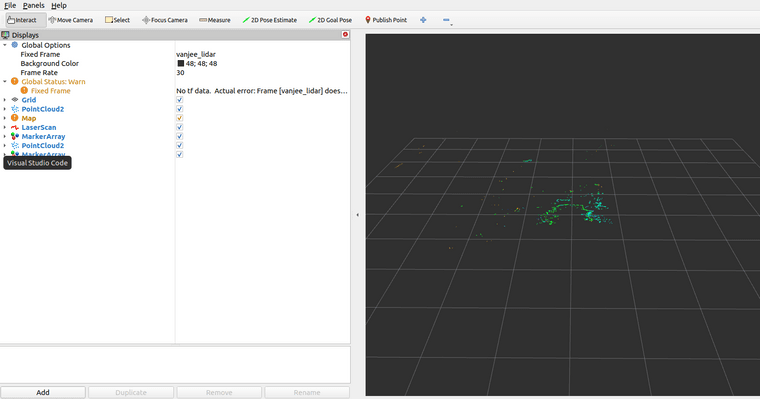
rviz2运行截图:
-
已解决。。。。。。。
-
@1103188343 兄弟,方便说一下你怎么解决的吗,我也是像你一样,只能在雷达坐标系显示点云,其他啥也没有,终端一直报[occupancy_grid_node]: submap_slices and last_frame_id is empty