rclpy未导入
-
在vscode中,一直提示
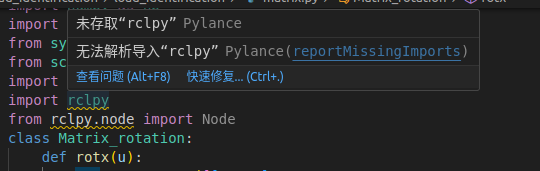 ,然后在终端中进行查看,终端回复Requirement already satisfied: rclpy in /opt/ros/humble/local/lib/python3.10/dist-packages (3.3.13),我python的编译器也是python3.10的,请问应该怎样解决这个问题呢?
,然后在终端中进行查看,终端回复Requirement already satisfied: rclpy in /opt/ros/humble/local/lib/python3.10/dist-packages (3.3.13),我python的编译器也是python3.10的,请问应该怎样解决这个问题呢? -
如果终端中显示
rclpy已经安装在你的 ROS 环境中的 Python 路径下,但在 VS Code 中提示未导入,这通常意味着 VS Code 的 Python 环境可能没有正确地设置为指向 ROS 的 Python 环境。要解决这个问题,你可以按照以下步骤操作:-
确保 ROS 环境变量已设置:
打开一个新的终端窗口,并运行echo $ROS_PYTHONPATH。这将显示 ROS Python 包的路径。如果这些路径没有包含在你的PYTHONPATH环境变量中,你需要将它们添加进去。 -
在 VS Code 中选择正确的 Python 解释器:
在 VS Code 的左下角,你应该能看到当前选择的 Python 解释器的版本。点击这个,然后选择“选择解释器”。在弹出的列表中,选择指向 ROS 安装目录下的 Python 解释器。这通常是一个类似于/opt/ros/humble/env的路径。 -
安装 Python 扩展:
确保你已经在 VS Code 中安装了 Microsoft 的 Python 扩展。这个扩展提供了对 Python 的良好支持,包括环境管理。 -
检查 VS Code 的设置:
有时候,你可能需要在 VS Code 的设置(通过点击左下角的齿轮图标并选择“设置”或使用快捷键Ctrl+,)中手动配置 Python 解释器的路径。搜索python.pythonPath并确保它指向正确的 ROS Python 解释器。 -
重启 VS Code:
在更改了环境设置后,重启 VS Code 以确保所有的更改都已生效。 -
检查代码中的导入语句:
确保你的代码中的import rclpy语句是正确的,并且没有拼写错误。 -
使用 ROS 工作空间:
如果你正在使用 ROS 工作空间,确保你已经正确地构建了你的工作空间,并且你的工作空间已经被添加到PYTHONPATH中。 -
检查 VS Code 的终端:
在 VS Code 中打开一个新的终端窗口,并尝试运行python -c "import rclpy; print(rclpy.__file__)"。如果这能够成功运行并打印出rclpy的文件路径,那么说明 VS Code 的终端环境是正确的。
如果以上步骤都不能解决问题,你可能需要进一步检查你的 ROS 安装和 VS Code 的配置。在某些情况下,重新安装 ROS 或 VS Code 的 Python 扩展也可能有助于解决问题。
以上为生成回答,仅供参考~
-
-
以解决,需要将设置```
source /opt/ros/humble/setup.bash添加到~/.bashrc文件中echo "source /opt/ros/humble/setup.bash" >> ~/.bashrc
source ~/.bashrc这样就会将ros2的路径添加到python的解释器中,robot@YL:~/ws_ros2$ echo $PYTHONPATH
/opt/ros/humble/lib/python3.10/site-packages:/opt/ros/humble/local/lib/python3.10/dist-packages显示这样的结果就大功告成了 /home/robot/Pictures/Screenshots/Screenshot from 2024-06-21 11-23-53.png -
1 1003844689 在 中 引用了 这个主题