使用robot_localization遇到的问题
-
在使用LIO-SAM进行定位的时候,因为odom累计误差太大,因此我想着使用robot_localization,但是运行效果在rviz看base_link和全局路径对不上了。如下:
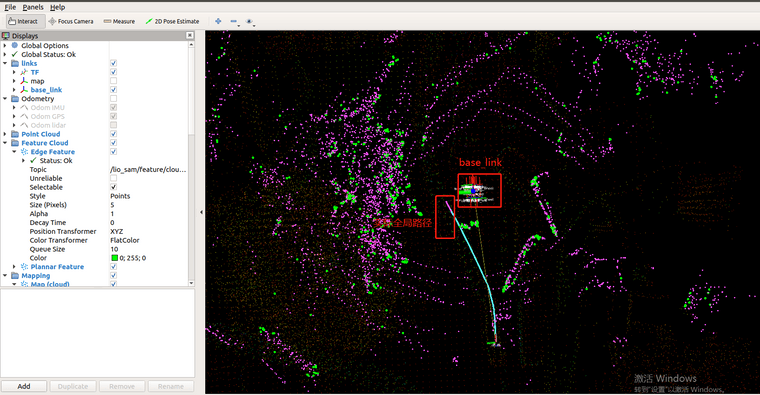
这个base_link和激光雷达数据是对不上地图的。在没使用robot_localization,仅仅是使用LIO-SAM进行定位的时候,不会出现这个问题,会是什么原因导致的呢?以下是我的TF树: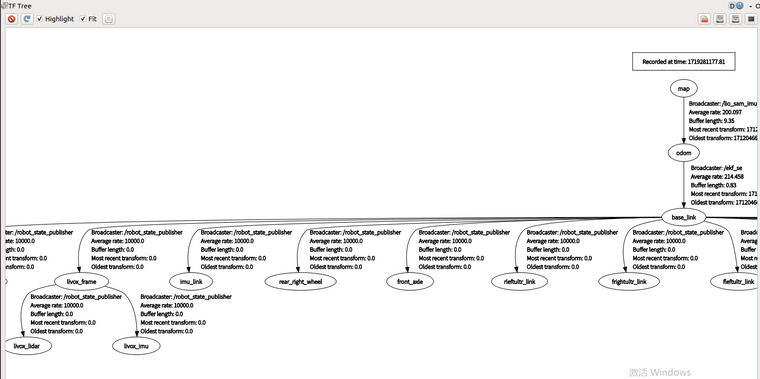
-
当您在使用
robot_localization时遇到base_link和全局路径对不上地图的问题,可能是由于几个原因导致的。以下是一些可能的原因和解决方案:-
参数配置问题:
robot_localization的配置参数可能不正确,比如odom_frame、base_link_frame、world_frame等参数是否与您的TF树和LIO-SAM的输出相匹配。process_noise_covariance、measurement_noise_covariance和initial_estimate_uncertainty等噪声和不确定性参数设置得是否合适。
-
时间同步问题:
- 确保所有传感器数据(如激光雷达、IMU等)都是时间同步的。时间戳的不一致可能导致定位不准确。
-
TF树问题:
- 检查TF树是否正确。确保
odom到map的转换是通过robot_localization发布的,并且base_link到odom的转换是来自LIO-SAM或其他里程计来源的。 - 如果TF树中有多个
odom到map的发布者,可能会产生冲突。
- 检查TF树是否正确。确保
-
坐标系不匹配:
- 确保所有坐标系(如
base_link、odom、map等)的定义和转换都是一致的。
- 确保所有坐标系(如
-
初始化问题:
robot_localization的初始姿态可能不准确。确保在启动robot_localization之前,您已经通过其他方式(如手动放置)给出了一个相对准确的初始姿态估计。
-
多传感器融合问题:
- 如果您正在使用多个传感器(如激光雷达和IMU)进行融合,确保它们的校准是正确的,并且它们的测量数据在
robot_localization中得到了正确的处理。
- 如果您正在使用多个传感器(如激光雷达和IMU)进行融合,确保它们的校准是正确的,并且它们的测量数据在
-
地图问题:
- 确保您使用的地图是准确的,并且与当前环境相匹配。
-
动态环境:
- 如果您的机器人在一个动态环境中运行,那么
robot_localization可能会受到移动障碍物的影响。考虑使用一种能够处理动态环境的定位方法。
- 如果您的机器人在一个动态环境中运行,那么
为了诊断问题,您可以尝试以下步骤:
- 检查
robot_localization的配置文件,确保所有参数都设置得正确。 - 使用
rosbag记录数据,并在离线模式下重放数据以进行调试。 - 使用
rviz的TF显示功能来检查TF树和转换是否正确。 - 查看
robot_localization的日志文件或输出,以查找可能的错误或警告消息。 - 尝试简化问题,例如只使用激光雷达数据进行定位,看看是否仍然存在问题。如果是这样,那么问题可能与
robot_localization无关,而可能与LIO-SAM或传感器数据有关。
以上为生成回答,仅供参考~
-