在使用LIO-SAM进行定位的时候,因为odom累计误差太大,因此我想着使用robot_localization,但是运行效果在rviz看base_link和全局路径对不上了。如下: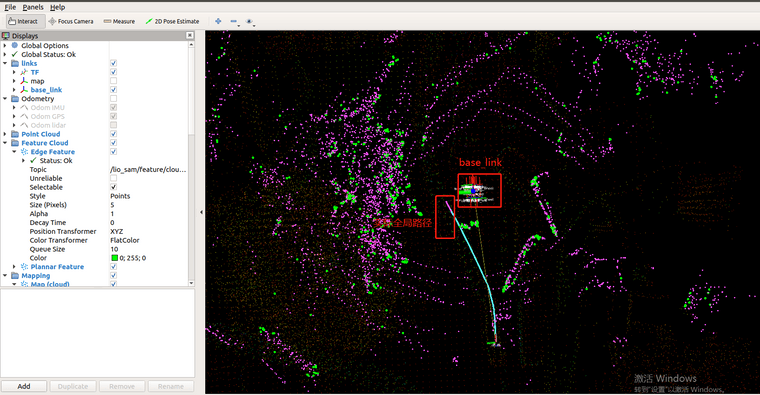
这个base_link和激光雷达数据是对不上地图的。在没使用robot_localization,仅仅是使用LIO-SAM进行定位的时候,不会出现这个问题,会是什么原因导致的呢?以下是我的TF树: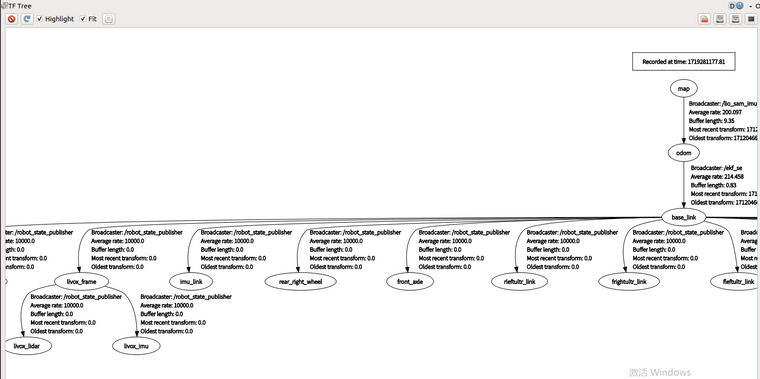
重要提示
鱼香小铺正式开业,最低499可入手一台能建图会导航的移动机器人,淘宝搜店:鱼香ROS 或点击链接查看。
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
提问前必看的发帖注意事项—— 提问前必看!不符合要求的问题拒绝回答!!
社区使用指南—如何添加标签修改密码
2
2442427120 发布的最新帖子
-
使用robot_localization遇到的问题发布在 机器人相关领域