agent用udp4方式启动没有反应
-
当你尝试使用UDP4方式通过agent来启动小车控制,并且没有反应时,这里有几个可能的解决步骤和考虑因素:
-
确认UDP配置:
- 确保你的agent配置正确,指向了正确的UDP端口和IP地址。
- 检查小车内部的程序是否也配置了正确的UDP端口和IP地址来监听或发送数据。
-
网络连通性:
- 使用
ping或telnet(如果UDP端口有对应的TCP监听服务)来检查从运行agent的设备到小车的网络连接是否正常。 - 确认没有防火墙或路由器设置阻止了UDP通信。
- 使用
-
UDP数据包调试:
- 使用网络调试工具(如Wireshark)来捕获UDP数据包,确保数据正在发送和接收。
- 检查数据包的内容是否符合你预期的格式。
-
代码问题:
- 你说到“wifi方式就会一直报错说有重复定义”,这可能是代码中的某个地方有重复定义的变量或函数。检查错误提示中提到的行号和文件,找到并修复重复定义的问题。
- 如果删除某个部分导致整个代码都不能用,可能需要重新审视代码结构,理解该部分的作用,并尝试以不同的方式修复问题,而不是简单地删除。
-
Docker与UDP:
- 如果之前使用Docker有问题,确保现在不是在Docker环境中运行UDP agent,或者Docker容器配置允许UDP通信。
- 如果有必要,检查Docker的网络设置和端口映射。
-
小车内部程序:
- 确保小车内部的
fishbot_motion_control程序正在运行,并且没有崩溃或进入某种错误状态。 - 如果可能,尝试在板子上直接运行一个简单的UDP监听程序来测试UDP通信是否正常。
- 确保小车内部的
-
日志和调试信息:
- 检查agent和小车内部程序的日志输出,看是否有任何有用的错误信息或提示。
- 增加日志级别或添加更多的调试语句来帮助定位问题。
-
其他注意事项:
- 确保小车的电源和硬件连接都正常。
- 如果可能,尝试使用更简单的测试案例来逐步排除问题,比如只发送一个简单的UDP数据包到小车来看它是否有反应。
-
寻求帮助:
- 如果以上步骤都不能解决问题,考虑在相关的开发者论坛、社区或支持渠道寻求帮助,并附上尽可能多的信息和日志输出。
希望这些建议能帮助你解决问题!
以上为生成回答,仅供参考~
-
-
@2431039560 有测试过默认的固件吗
-
@小鱼 暂时没有其他的固件,,我这里有三辆fishbot的小车,但好像都是这个问题,会不会是WiFi_udp4那块的代码要改一些东西,我跟着动手学ROS2做过来到最后那一步把fishbot_motion_control_microros的代码烧进去了。然后我用串口模式是可以控制fishbot小车的
-
@2431039560 可以直接看下快速上手教程,直接用里面的固件试一试能不能用
-
@小鱼
 好像也是一样的诶
好像也是一样的诶 -
@小鱼 小鱼,如果用ros2的domain通信要怎么设置呀
-
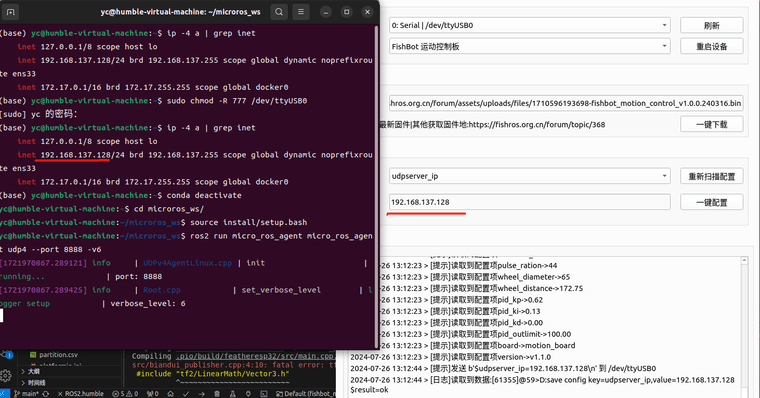
@2431039560 看你的网段是137,是不是手机开的热点哇(ノ゚▽゚)ノ,可以找客服要一下常见网络结构视频,使用推荐的网络结构
-
@小鱼 哈哈哈,是的,我先去找客服问一下吧
-
@小鱼
 小鱼,现在小车连到了路由器,然后小车ip和电脑ip/香橙派ip都在同一子网下xx.1.xx了,也ping的通,但好像agent udp4这方面还是联不通诶,,这个要怎么解决呀,小车是192.168.1.32,电脑是192.168.1.33,香橙派是192.168.1.26
小鱼,现在小车连到了路由器,然后小车ip和电脑ip/香橙派ip都在同一子网下xx.1.xx了,也ping的通,但好像agent udp4这方面还是联不通诶,,这个要怎么解决呀,小车是192.168.1.32,电脑是192.168.1.33,香橙派是192.168.1.26 -
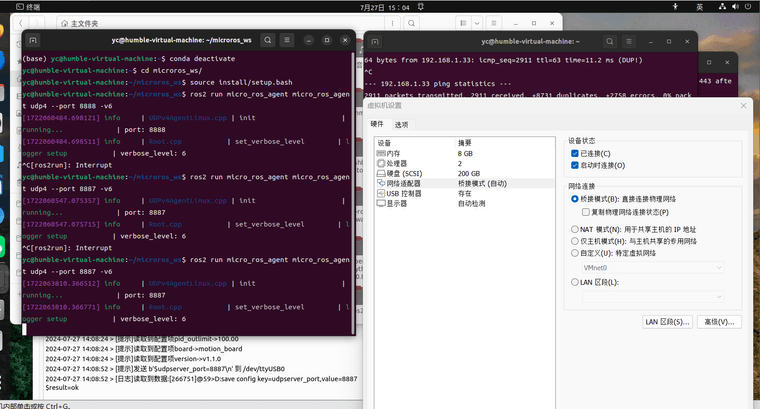
@2431039560 你为什么用的是8887端口
-
@小鱼 默认的8888也试过了,好像也不行

-
@2431039560 你要设置成和主控板配置相同的端口,服务器地址也要设置正确
-
@小鱼 主控板相应端口怎么看呀,是配置助手里自己配置的那个端口号吗,还有服务器地址是小车显示屏上的地址吗,我配置助手里也改成了小车显示屏上的地址
-
@2431039560 小车显示器显示的应该是小车自己的Ip地址,配置助手里配置的是agent电脑的地址,原理很简单,就是小车把数据发送给指定ip和端口号的计算机,所以主要配置这两个参数,如果你小车里配置的是往某个up和端口发,你要确保小车可以连接到对应的Ip和端口。看看能不能理解这个意思
-
@小鱼
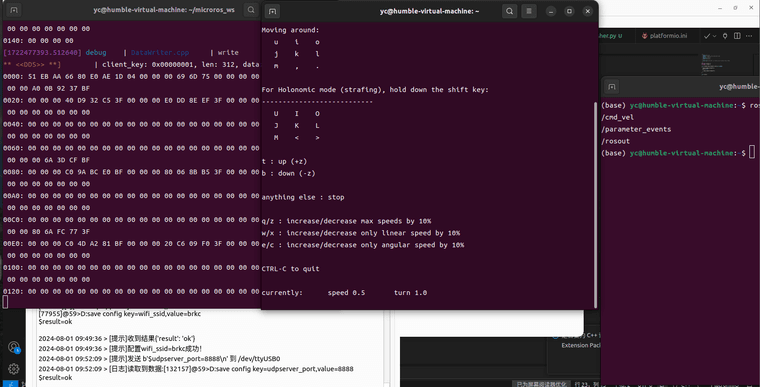
谢谢小鱼,WiFi控制成功了!!! -
@2431039560 恭喜哈~