fishbot机器人ROS2编队开发问题
-
小鱼,我最近在做机器人编队,要用摇杆控制fishbot小车前进方向,但是小车之间收发信号好像一直没调通,这个该怎么做呀(具体的话就是我在主车发布里程计和imu的数据,让跟随的小车通过tf坐标变换实现跟随,但是只在模拟的时候成功了,放到实际的小车上调不通,也没有imu的话题),在esp32里可以结合之前案例里的例子吗,我想结合但该怎么实现呀



具体程序的话跟随的前半部分是这样的 -
针对您描述的fishbot机器人ROS2编队开发问题,我们可以从几个方面来分析和解决:
1. 确保ROS2网络通信
首先,确保ROS2网络在您的实际硬件上能够正常工作。这包括:
- ROS2节点发现:确保所有机器人(主车和跟随车)都能相互发现节点。可以使用
ros2 node list来查看当前所有活动的节点。 - 话题订阅与发布:确认主车是否成功发布了里程计(
/odom)和IMU(如/imu)数据,以及跟随车是否成功订阅了这些话题。可以使用ros2 topic list查看所有话题,使用ros2 topic echo /topic_name来查看特定话题的数据。
2. 检查IMU数据
如果IMU话题在实际硬件上不存在,可能的原因有:
- 硬件连接问题:确保IMU传感器已正确连接到ESP32或其他处理单元,并且该单元已正确配置以输出IMU数据。
- 驱动程序和固件:检查ESP32上是否有支持IMU的驱动程序和固件。可能需要更新或重新配置这些组件。
- ROS2节点配置:确保ROS2节点正确配置了IMU数据的读取和发布。
3. 结合ESP32与ROS2
在ESP32上结合ROS2通常涉及使用如
micro_ros_arduino之类的库,但这通常用于较小的微控制器,ESP32由于其较高的处理能力,更常直接运行ROS2的某些组件或作为中间层。- 使用ROS2组件:如果可能,直接在ESP32上运行ROS2组件(例如使用官方支持的ROS2 for ESP32或类似的解决方案)。
- 中间件:如果直接在ESP32上运行ROS2不可行,可以使用MQTT、WebSocket或其他轻量级协议作为中间层来传输数据。ESP32可以作为客户端,发送IMU和里程计数据到ROS2网络中的一个节点,该节点再将这些数据发布为ROS2话题。
4. 调试和日志
- 增加日志:在ROS2节点和ESP32代码中增加详细的日志记录,以便在出现问题时能够追踪。
- 硬件连接测试:使用简单的测试程序来验证ESP32与IMU传感器之间的连接和通信是否正常。
5. 示例代码
对于ESP32与ROS2的结合,如果直接支持有限,可以考虑以下基本步骤:
- ESP32端:读取IMU和里程计数据,通过MQTT或WebSocket发送到ROS2网络中的一个中间节点。
- ROS2中间节点:订阅来自ESP32的数据,并将其转换为ROS2话题。
- 跟随车ROS2节点:订阅这些话题,进行坐标变换和路径规划。
6. 硬件和网络问题
- 网络配置:确保所有机器人都连接到同一个网络,并且没有网络隔离或防火墙阻止ROS2通信。
- 电源和稳定性:检查所有硬件的电源供应和稳定性,确保没有电源问题导致的数据传输中断。
通过上述步骤,您应该能够逐步诊断并解决问题,使fishbot小车的编队功能在实际硬件上正常运行。
以上为生成回答,仅供参考~
- ROS2节点发现:确保所有机器人(主车和跟随车)都能相互发现节点。可以使用
-
@2431039560 先选择一个通信方式,然后调通通信,获取到 imu odom 和 cmd_vel 话题
-
@小鱼 小鱼,这个项目可以用多协议控制器的板子吗,还是用二驱走UDP4也可以
-
@2431039560 多协议板子设计用在大机器人上的,你搞小车走UDP4就可以了
-
@小鱼 emmm,我已经下单了,那用在大机器人上有哪些可以做开发的呢哈哈哈,有没有例程练练手的,等明年毕业了毕业设计走起
就是小车编队现在是卡在香橙派上订阅者的节点总是不编译不成功,不是tf2、tf2_ros有问题就是buffer有问题,这些解决了又是图上的这个问题,,,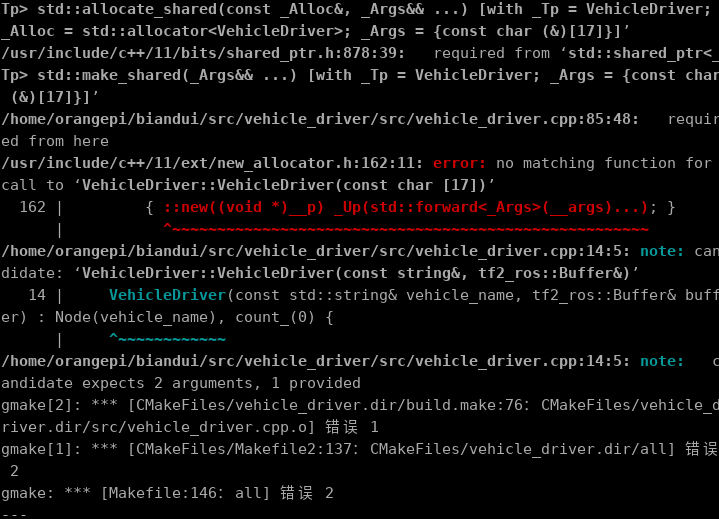
电脑的话已经写好publisher和编队节点,能够发布/leader/imu、/leader/odom、/cmd_vel的命令了,/cmd_vel我是写了一个模拟摇杆的程序接到/cmd_vel上的,但是因为香橙派的订阅者还不能编译成功所以就没往下进行了 -
@2431039560 我估计是版本问题