鱼香ROS教程中slam建图出现map缺失问题
-
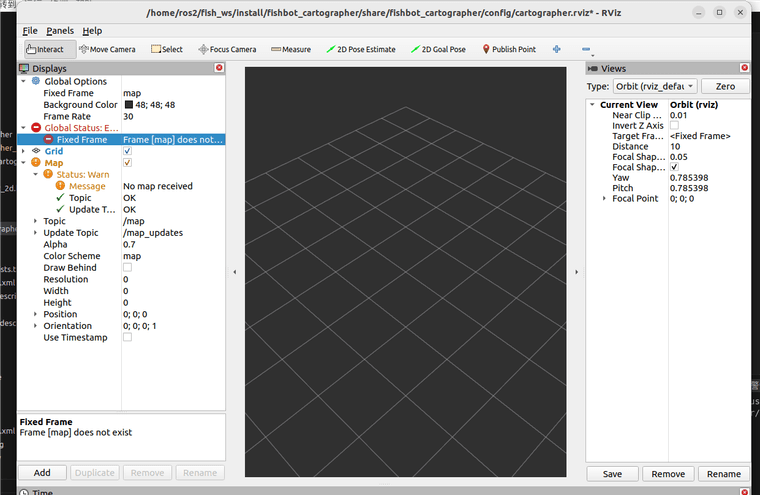
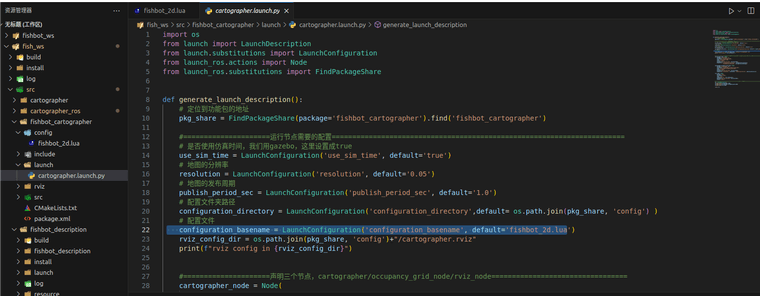
代码均使用教程中的,前面仿真环境也都能运行,就是运行 fishbot_cartographer功能包中cartographer.launch.py出现错误。
查阅网上资料说是launch文件中的配置文件与config中.lua文件名字不对应,但这里是对应的,就是不知道怎么去解决了 -
在解决使用Cartographer进行SLAM建图时出现的map缺失问题时,我们需要仔细排查几个常见的配置和环境问题。虽然你已经提到配置文件名称对应的问题已经排除,但我们可以从以下几个方面进行排查:
-
配置文件检查:
- 确保
.lua配置文件中的参数设置正确,特别是与地图分辨率、传感器数据(如激光扫描或深度相机)相关的参数。 - 检查
.lua文件中引用的传感器校准参数(如变换矩阵)是否正确无误。
- 确保
-
Launch文件检查:
- 确保在
cartographer.launch.py中正确引用了.lua配置文件。 - 检查是否所有必要的ROS节点都已正确启动,包括传感器数据发布节点和Cartographer节点。
- 确保在
-
ROS节点和话题:
- 使用
rostopic list命令查看所有当前发布的话题,确保Cartographer节点所需的所有传感器数据话题都在列表中。 - 使用
rostopic echo /your_topic_name(替换为你的传感器数据话题)来检查数据是否正确发布。
- 使用
-
TF变换:
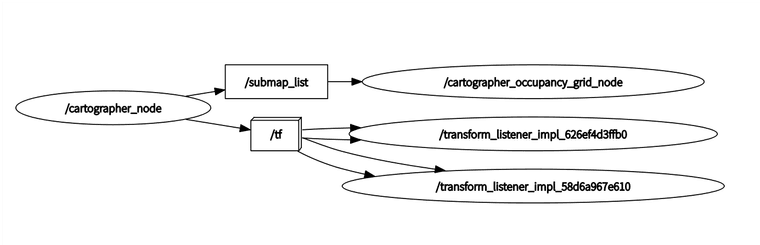
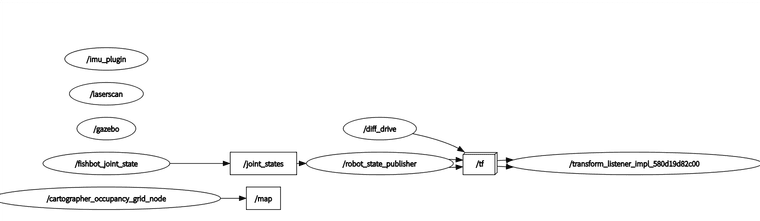
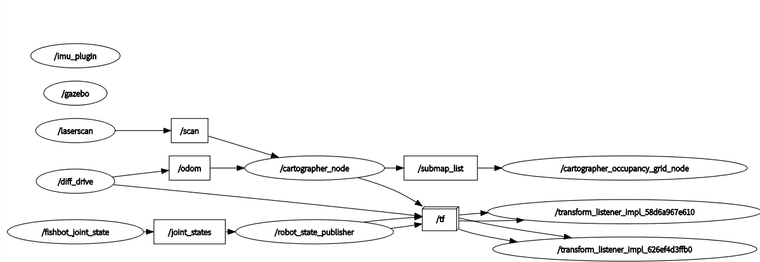
- 确保所有的TF变换都正确无误。可以使用
rosrun tf view_frames命令生成一个PDF文件来可视化TF树,检查是否有缺失或错误的变换。 - 使用
rostopic echo /tf来实时查看TF变换信息。
- 确保所有的TF变换都正确无误。可以使用
-
日志和错误消息:
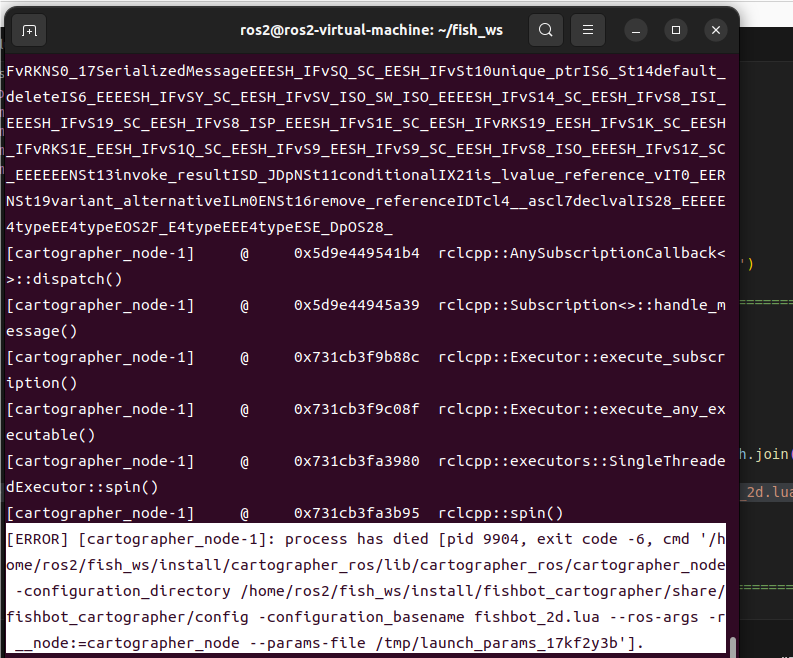
- 仔细查看ROS终端中的输出和错误消息,特别是Cartographer节点输出的日志。
- 检查是否有关于数据同步、传感器配置错误或内存不足的警告或错误。
-
环境设置:
- 确保你的ROS版本与Cartographer的版本兼容。
- 检查是否有任何系统级的限制(如内存不足、磁盘空间不足)影响了Cartographer的运行。
-
使用示例数据测试:
- 如果可能,尝试使用Cartographer提供的示例数据来运行你的配置,以排除是数据问题还是配置问题。
-
更新和重新安装:
- 确保你的Cartographer和相关依赖库都是最新版本。
- 如果问题依旧,尝试重新安装Cartographer和相关ROS包。
-
社区和文档:
- 查阅Cartographer的官方文档和GitHub问题跟踪器,看看是否有其他用户遇到并解决了类似的问题。
- 在ROS社区论坛(如ROS Answers)发帖询问,可能有其他用户或专家能提供帮助。
通过以上步骤,你应该能够定位并解决导致map缺失的问题。如果问题仍然存在,你可能需要更详细地检查你的具体配置和环境设置。
以上为生成回答,仅供参考~
-
-
-
在ROS(Robot Operating System)中,
launch文件是用来启动一组节点的配置文件,通常用于设置机器人仿真、传感器数据发布、地图构建等任务。从你提供的信息来看,你提到了两种情况:一是只运行建图的launch文件,二是同时运行仿真环境与建图的launch文件。下面我将分别解释这两种情况下可能出现的节点列表及其功能。1. 只运行建图的
launch文件在这种情况下,通常启动的节点与地图构建直接相关。这包括但不限于:
- 地图构建节点(如
slam_gmapping,cartographer_node,rtabmap_ros等):这个节点负责接收来自传感器(如激光扫描仪或摄像头)的数据,并基于这些数据构建环境的地图。 - 传感器数据发布节点(如果
launch文件中也包含了传感器模拟):这些节点模拟或真实地从传感器设备读取数据,并将其发布到ROS话题上,供地图构建节点使用。 - 转换树管理器(如
tf2_static_transformer或tf_broadcaster):这些节点负责处理不同坐标系之间的转换,对于机器人定位和地图构建至关重要。 - 可能的其他辅助节点:如参数服务器、服务节点等,这些节点可能用于配置地图构建节点的参数或提供其他辅助功能。
2. 同时运行仿真环境与建图的
launch文件在这种情况下,除了上述与地图构建相关的节点外,还会启动与仿真环境相关的节点:
- 仿真环境节点(如
gazebo或ignition gazebo):这是仿真环境的主体,它模拟了机器人的物理环境,包括障碍物、地面、其他动态物体等。 - 机器人模型节点:在仿真环境中,需要有一个节点来加载和模拟机器人的物理模型,包括其传感器、关节、动力学特性等。
- 传感器仿真节点:这些节点模拟了机器人上安装的传感器,如激光雷达(LIDAR)、摄像头等,并将模拟的传感器数据发布到ROS话题上。
- 控制器节点(可选):在复杂的仿真中,可能还需要控制器节点来控制机器人的运动,这些节点根据目标位置、障碍物等信息生成控制命令。
总结
无论是单独运行建图的
launch文件还是同时运行仿真环境与建图的launch文件,节点的具体组成都会根据具体的应用场景和使用的软件包而有所不同。然而,基本的组成包括地图构建节点、传感器数据发布节点、转换树管理器以及(在仿真环境中)仿真环境节点和机器人模型节点。
以上为生成回答,仅供参考~
- 地图构建节点(如
-
@小伊 先运行建图,再运行仿真环境的,节点如下:
-
在构建和运行一个包含建图和仿真环境的系统时,通常我们会先定义和构建地图(Map Building),然后在该地图上运行仿真环境(Simulation Environment),用于测试算法、车辆或机器人的行为。这里的“节点”可能指的是在仿真环境中运行的独立实体,如车辆、传感器、控制器等。下面是一个简化的步骤流程,以及可能涉及的技术和工具,用于实现这一过程:
1. 定义和构建地图
步骤:
- 选择地图类型:首先确定需要哪种类型的地图,比如二维栅格地图、三维点云地图、拓扑地图等。
- 收集数据:使用传感器(如激光雷达、摄像头、GPS等)在真实环境中收集数据。
- 数据处理:对数据进行预处理,如去噪、校准等。
- 地图构建:使用SLAM(Simultaneous Localization and Mapping,即时定位与地图构建)算法或手动方式构建地图。
- 地图验证:验证地图的准确性和完整性。
工具和技术:
- ROS (Robot Operating System):一个强大的机器人软件框架,支持多种编程语言,提供丰富的库和工具来构建机器人应用。
- GMapping、Hector SLAM、Cartographer等SLAM算法库。
- PCL (Point Cloud Library):用于处理3D点云数据。
2. 设置仿真环境
步骤:
- 选择仿真平台:根据需求选择合适的仿真平台,如Gazebo、V-REP、Unity等。
- 导入地图:将之前构建的地图导入到仿真环境中。
- 配置节点:在仿真环境中添加和配置各种节点,如车辆、传感器、控制器等。
- 设置仿真参数:设置仿真环境的物理参数、光照、障碍物等。
- 编写控制算法:如果需要,编写控制算法来控制节点(如车辆)的行为。
工具和技术:
- Gazebo:一个强大的3D机器人仿真平台,支持多种物理引擎和传感器模型。
- ROS与Gazebo集成:ROS提供了与Gazebo无缝集成的工具,使得在ROS中编写的代码可以直接在Gazebo的仿真环境中运行。
- Unity:一个游戏开发引擎,也常用于VR/AR和机器人仿真。
3. 运行仿真
步骤:
- 启动仿真环境:启动仿真平台并加载配置好的环境。
- 运行节点:在仿真环境中启动各个节点,并观察它们的行为。
- 收集数据:根据需要收集仿真过程中的数据,如传感器数据、节点状态等。
- 分析和调试:分析仿真结果,调整参数和算法,直到满足要求。
注意:
- 在构建和仿真过程中,需要确保地图的准确性和仿真环境的逼真度,以便更好地模拟真实世界的情况。
- 仿真环境的设置和调试可能需要多次迭代,以优化性能和准确性。
- 根据具体的项目需求选择合适的工具和技术,以提高开发效率和结果质量。
以上为生成回答,仅供参考~
-
你好,请问这个问题现在解决了吗,是怎么解决的,我也遇到同样的问题了
-
@2431039560 你好请问解决了吗我也有这个问题
-
您好,请问解决了吗?