wsl2下的通信如何实现
-
@948947792 wsl 应该共用的宿主机ip,你是怎么个网络结构呢,小车物理层如何和电脑连接的
-
@小鱼 谢谢大佬解答,我现在在wsl里面使用docker拉取了配置助手,并都配置好了,但是ros2 topic list里面仅仅出现了/parameter_events,/rosout这两个话题,不知道这算不算已经弄好了

-
图片如下

ros2 topic list 的结果

-
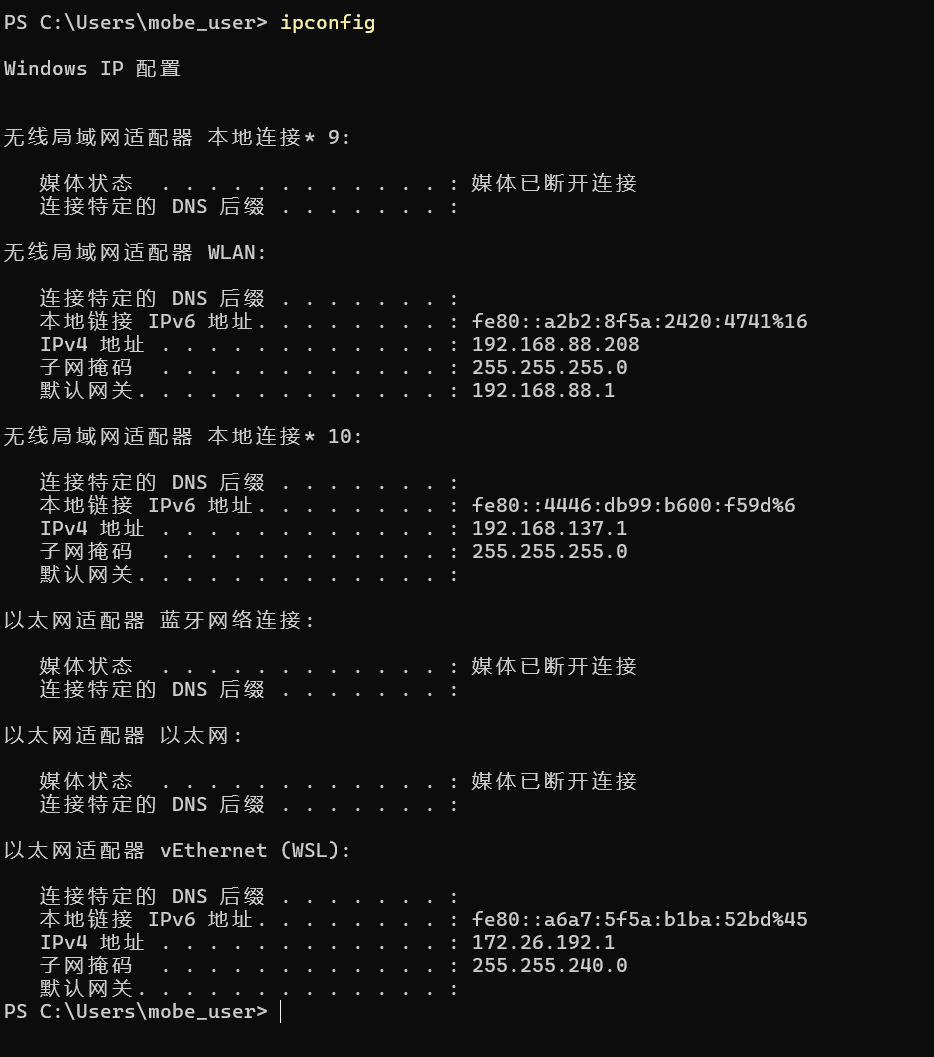
@948947792 主要问题就是在wsl中使用ip -4 a | grep inet看电脑的ip地址时,输出入下

不知道该选择哪个地址了,然后在宿主机中使用 ipconfig得到
-
@948947792 现在的网络是由电脑热点实现的,因为没有路由器,想着先拿电脑热点试试,小车采用usb线与电脑连接
-
@948947792 热点大概率穿不透到docker内部网络,两个ip不在一个网段
-
请问有解决问题吗?我也发现ros2或者ros不能收到远端topic的问题,但是如果有rosbag包在本地播放的话就没问题。
-
@wuhanros 请问有解决吗?我最近也在使用wsl2安装ubuntu22.04+ros2和小车通讯,发现wsl2的ros2无法接收到小车节点发布的内容,但是换成ubunt22.04实体机可以。
-
@1253024365 把网络结构和ip搞出来看看,另外你用docker还是手动构建的
-
@小鱼 感谢您的回复,已解决。使用wsl2时需要与主机做一个镜像模式网络才行,结合wsl2官网的指示与sudo gedit ~/.bashrc
添加export ROS_HOSTNAME=192.168.xx.xxx
export ROS_MASTER_URI=http://192.168.xx.xxx:11311的方法解决了wsl2与ubuntu实体机无法通讯的问题。 -
@1253024365 您好,能详细说下解决方案吗,wsl下和ubuntu主机下都要设置吗,ROS_HOSTNAME 设置的是wsl的ip还是宿主机的ip?