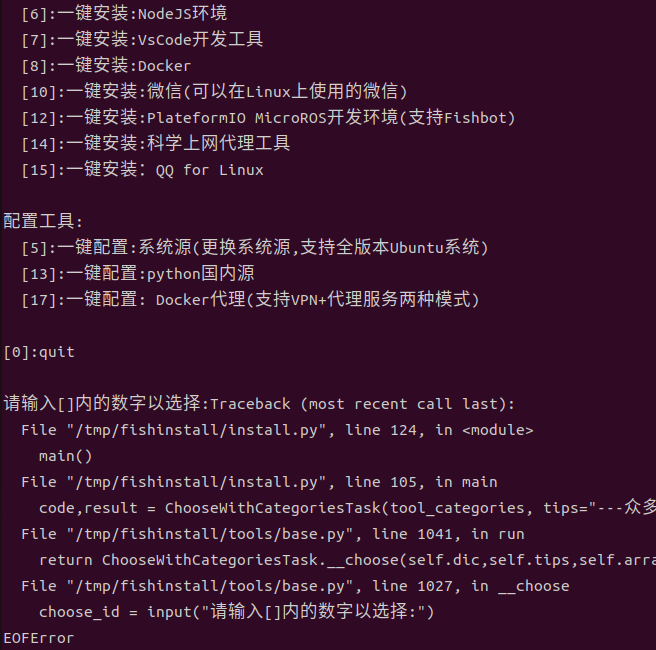
已经利用一键安装安装了docker,docker 其中一个容器中安装了ros1,想再这个容器中一键安装ros2,发现会一直循环图一,按照给的教程,分步执行,也会报错
-
wget http://fishros.com/install -O fishros
cd fishros
chmod +x fishros
./fishros //在执行最后一条指令报错
-
@2320938194 在 已经利用一键安装安装了docker,docker 其中一个容器中安装了ros1,想再这个容器中一键安装ros2,发现会一直循环图一,按照给的教程,分步执行,也会报错 中说:
./fishr
bash fishros 看看
-
在Docker容器中安装ROS(Robot Operating System)通常需要考虑容器内的环境设置和依赖关系。从你提供的描述来看,你正在尝试在一个已经安装了ROS 1的Docker容器中安装ROS 2,这可能会因为依赖冲突或环境设置不当而导致问题。下面是一些步骤和建议,帮助你解决安装ROS 2时遇到的问题:
1. 检查Docker容器的基础镜像
确保你的Docker容器是基于支持ROS 2的操作系统镜像,如Ubuntu 20.04,因为ROS 2的某些版本可能不支持较旧的操作系统。
2. 使用Dockerfile进行构建
如果你还没有Dockerfile,可以创建一个,并在其中设置所有必要的依赖项和步骤来安装ROS 2。这样,你可以更精确地控制容器内的环境。
示例Dockerfile(基于Ubuntu 20.04):
FROM ubuntu:20.04 # 安装依赖 RUN apt-get update && apt-get install -y \ sudo \ wget \ && rm -rf /var/lib/apt/lists/* # 安装ROS 2 RUN sudo apt update && sudo apt install -y \ python3-rosdep \ python3-rosinstall \ python3-vcstools \ && sudo rosdep init \ && rosdep update \ && mkdir -p ~/ros2_ws/src \ && cd ~/ros2_ws \ && wget https://raw.githubusercontent.com/ros2/ros2/master/ros2.repos \ && vcs import src < ros2.repos \ && cd ~/ros2_ws \ && colcon build --packages-select rclpy_examples \ && . install/setup.bash # 设置环境变量 ENV ROS_DISTRO="foxy" ENV ROS_VERSION="2" ENV PYTHONIOENCODING=utf8 # 进入ROS 2环境 ENTRYPOINT ["/bin/bash", "-c", "source /root/ros2_ws/install/setup.bash; bash"]3. 解决安装过程中的错误
如果在使用
fishros脚本或类似脚本时遇到错误,请检查错误消息以确定问题的具体原因。可能的错误包括网络问题、依赖冲突或脚本本身的问题。- 网络问题:确保容器内的网络配置正确,可以访问外部资源。
- 依赖冲突:如果容器内已经安装了与ROS 2冲突的库或软件包,可能需要先卸载它们或选择另一个容器镜像。
- 脚本问题:检查脚本是否适用于你的ROS 2版本和操作系统。
4. 调试容器
如果可能,使用
docker exec -it <container_id> /bin/bash进入容器内部,手动执行安装命令,以便更清楚地看到发生了什么。5. 查阅官方文档和社区
ROS 2的官方文档和社区论坛是解决安装问题的宝贵资源。查看是否有其他人遇到了类似的问题,并查找推荐的解决方案。
通过这些步骤,你应该能够解决在Docker容器中安装ROS 2时遇到的问题。如果问题仍然存在,请提供更详细的错误消息以便进一步分析。
以上为生成回答,仅供参考~
-
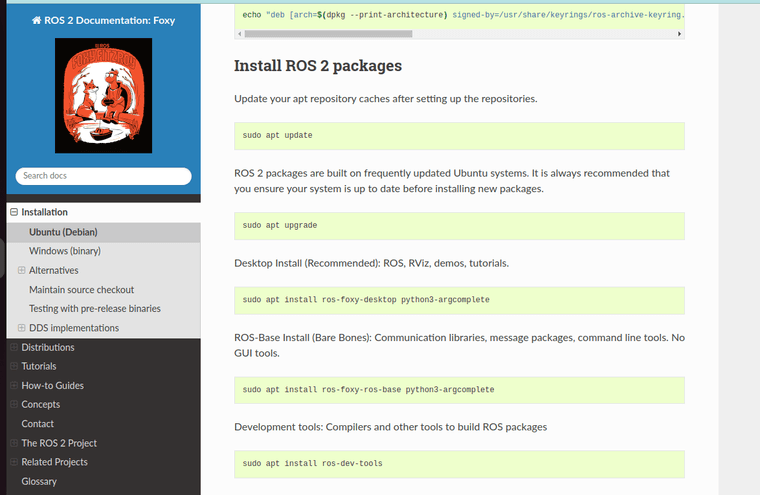
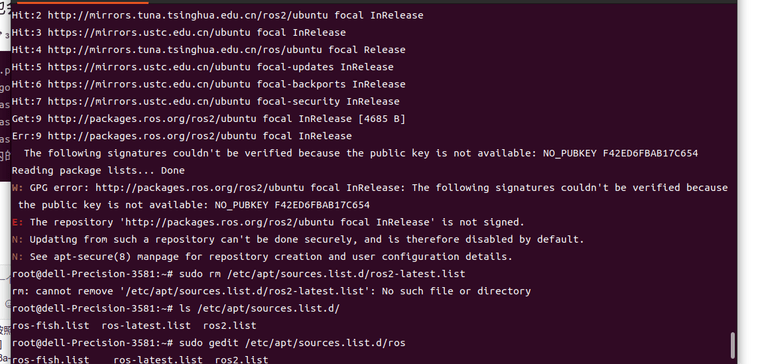
现在执行不会最后一步不会报错了,有可能是因为我按照官网信息直接安装,如图一
官网链接:https://docs.ros.org/en/foxy/Installation/Ubuntu-Install-Debians.html
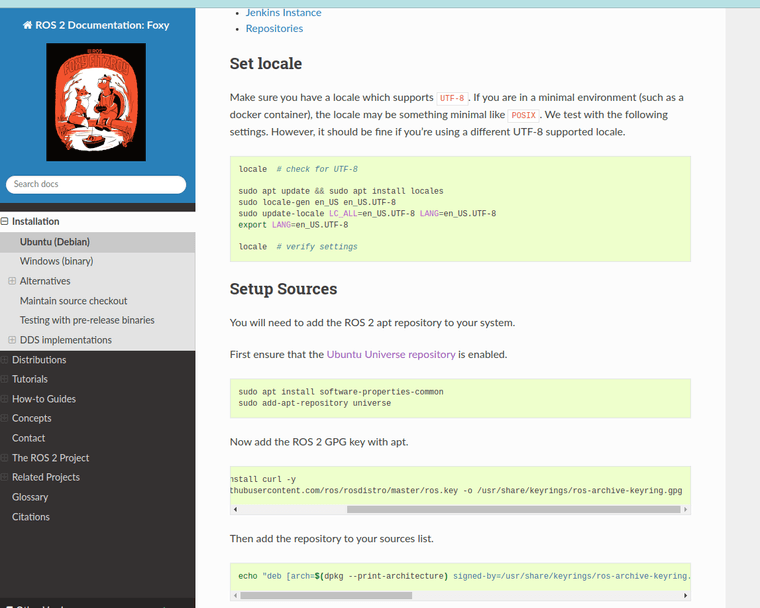
但是执行这一步报错。
sudo curl -sSL https://raw.githubusercontent.com/ros/rosdistro/master/ros.key -o /usr/share/keyrings/ros-archive-keyring.gpg
然后官网的错误解决了很久,没解决掉,此时在,执行./fishros,没有抛出最开始的EOFError了。然后依次选择相关的选项,没有抛出错误,最后成功安装并运行了小海龟。
欢迎是官网的某些配置解决了这个问题。 -
此回复已被删除!