数据漫游网络下的多机通信问题
-
#背景:
我们想要设备在大范围内都能联网,所以使用多个无线交换机(AP)和路由器组成了局域网,ROS2设备会根据信号强度自动连接到相应AP,网络中各设备在同一网段,能相互ping通,AP之间的区别仅是信道不同。#测试:
连接到不同AP上的ROS2设备搜索不到另一台设备的话题;
TCP、UDP均能进行通信;
设置了DDS的Fast DDS Discovery Server作为发现协议,但对情况没有帮助。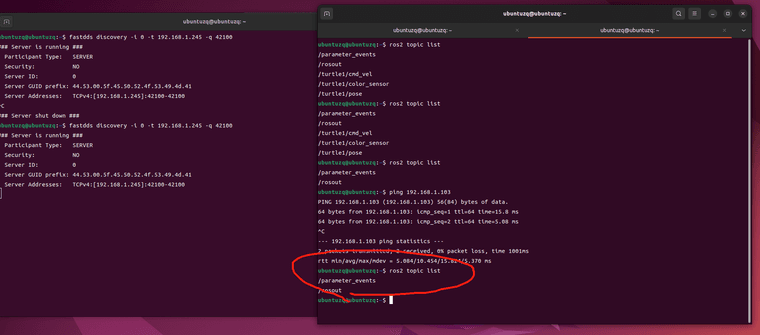
#问题:
这是否与DDS通信设置有关,需要更改哪些配置;
DDS通信能否在不同信道设备间进行,如果不行,多机通信如何实现在大范围内都能联网。#非常感谢阅读我们的问题,希望能够得到建议和帮助
-
针对您描述的问题,我们可以从DDS通信设置、不同信道设备间的通信以及大范围内多机通信的实现方式几个方面进行分析和解答。
一、DDS通信设置问题
-
Fast DDS Discovery Server配置:
- 既然您已经设置了Fast DDS Discovery Server作为发现协议,但问题依旧存在,那么可能需要检查以下几点:
- 确保所有ROS2设备都能够访问到Discovery Server。这包括网络配置(如IP地址、端口号等)是否正确,以及是否有防火墙或安全组策略阻止了访问。
- 检查Discovery Server的配置是否正确,包括服务器ID、监听接口和端口等。
- 确保ROS2设备上的环境变量如
ROS_DISCOVERY_SERVER已正确设置,指向Discovery Server的地址和端口。
- 既然您已经设置了Fast DDS Discovery Server作为发现协议,但问题依旧存在,那么可能需要检查以下几点:
-
ROS2环境配置:
- 检查ROS2环境是否配置正确,包括是否已正确安装DDS中间件,以及ROS2环境变量(如
RMW_IMPLEMENTATION)是否设置为使用DDS。
- 检查ROS2环境是否配置正确,包括是否已正确安装DDS中间件,以及ROS2环境变量(如
二、不同信道设备间的通信
-
信道与通信:
- 在无线网络中,不同的信道主要用于减少干扰,提高网络性能。然而,信道本身并不直接影响网络层或传输层的通信。只要设备在同一网络(子网)内,并且网络层路由正确,不同信道上的设备应该能够正常通信。
-
通信问题排查:
- 既然TCP和UDP通信都能正常进行,说明网络层是连通的。问题可能出在DDS的特定配置上,或者ROS2节点间的发现机制上。
三、大范围内多机通信的实现
-
网络架构优化:
- 确保无线网络覆盖全面,AP分布合理,以减少信号盲区。
- 考虑使用更高性能的无线网络设备,如企业级AP,以提高网络容量和稳定性。
-
通信协议与中间件选择:
- 继续使用Fast DDS作为发现协议,并优化其配置。如果问题依旧存在,可以考虑使用其他中间件或协议进行节点间的通信。
- 考虑使用ROS2内置的通信机制(如TCP/UDP),并结合适当的网络配置和防火墙策略,确保通信的顺畅。
-
多AP间的漫游与切换:
- 确保ROS2设备在移动过程中能够顺利地从一个AP切换到另一个AP,并保持通信不断。这可能需要配置AP的漫游参数,如信号阈值、切换时间等。
-
安全与稳定性:
- 加强网络安全措施,如使用VPN加密通信、定期更新防病毒软件等,以保护数据安全和隐私。
- 监控网络性能和稳定性,及时发现并解决问题。
总结
针对您描述的问题,建议首先检查DDS通信设置和ROS2环境配置,确保一切正确无误。如果问题依旧存在,可以考虑优化网络架构、更换通信协议或中间件,并加强网络安全和稳定性措施。同时,确保ROS2设备在移动过程中能够顺利漫游和切换AP,以保持通信的连续性。
以上为生成回答,仅供参考~
-
-
啊突然想起来这件事回来mark一下。
#原因
ROS2使用的DDS通信依赖于路由器的组播通信功能,我们当时使用的网络设备禁用了wlan口的组播通信#解决方案
1、后续更换了其他厂家网络设备能够进行通信;
2、其他厂家的设备能work所以找到了原本的网络设备供应商,他们的工程师过来排查出了上述问题,修改了路由器的驱动后能够work了。#一些感想
 做机器人真的是系统工程,机械电气控制通信都要有一定的涉猎,一个电气/控制方向的学生解决不了的问题对通信口的学生来说就是很基础的问题
做机器人真的是系统工程,机械电气控制通信都要有一定的涉猎,一个电气/控制方向的学生解决不了的问题对通信口的学生来说就是很基础的问题