第三章,3.4.2自定义通讯接口,在编译功能包的时候报错
-
-
在ROS(Robot Operating System)中,如果你在编译一个功能包(package)时遇到了与自定义通讯接口相关的错误,这通常涉及到几个可能的原因。为了帮助你解决这个问题,我们可以按照以下步骤进行排查和解决:
1. 检查CMakeLists.txt和package.xml
-
CMakeLists.txt:确保你的CMakeLists.txt文件中正确配置了所有依赖项和编译指令。特别是,如果你正在使用自定义的消息或服务,需要确保
find_package()调用了catkin_SIMPLE_INCLUDE_DIRS()或相应的宏来包含这些消息和服务的头文件。同时,确保add_dependencies()和catkin_package()被正确使用。 -
package.xml:检查你的
package.xml文件是否正确声明了所有依赖项。特别是,如果你的包依赖于其他ROS包(如自定义的消息类型),你需要在<depend>标签中列出它们。
2. 检查消息和服务文件
- 确保你的
.msg和.srv文件语法正确,且位于正确的文件夹(通常是msg或srv文件夹内)。 - 使用
rosmsg show <your_msg_or_srv_name>或rossrv show <your_srv_name>来验证ROS是否能够找到并解析这些文件。
3. 检查环境设置
- 确保你的ROS环境变量(如
ROS_PACKAGE_PATH)设置正确,以便ROS能够找到你的包。 - 使用
rospack find <your_package_name>来检查ROS是否能够找到你的包。
4. 编译错误日志
- 仔细阅读编译错误日志。这些日志通常会指出问题所在,比如缺失的头文件、类型不匹配或语法错误。
- 如果错误与
catkin_make或catkin build相关,尝试清理构建目录(catkin_make clean或删除build和devel目录后重新构建)。
5. 依赖关系
- 如果你的包依赖于其他自定义的ROS包,确保这些包也已经被正确编译并安装在你的ROS工作空间中。
- 使用
rosdep工具来安装任何缺失的依赖项。
6. 搜索类似问题
- 在ROS社区(如ROS Answers, Stack Overflow等)搜索类似的编译错误,看看其他人是如何解决的。
7. 更新和重新安装
- 如果问题依旧存在,尝试更新ROS和所有相关包。
- 在极端情况下,重新安装ROS和相关的依赖项可能有助于解决问题。
通过上述步骤,你应该能够定位并解决在编译ROS功能包时遇到的与自定义通讯接口相关的错误。如果问题仍然存在,请提供更详细的错误信息,以便进一步分析。
以上为生成回答,仅供参考~
-
-
@1572484716 下次记得复制粘贴,不要截图:https://fishros.org.cn/forum/topic/151/提问前必看-不符合要求的问题拒绝回答/1
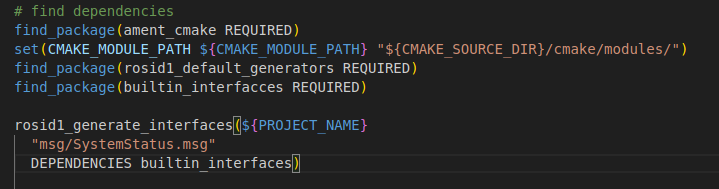
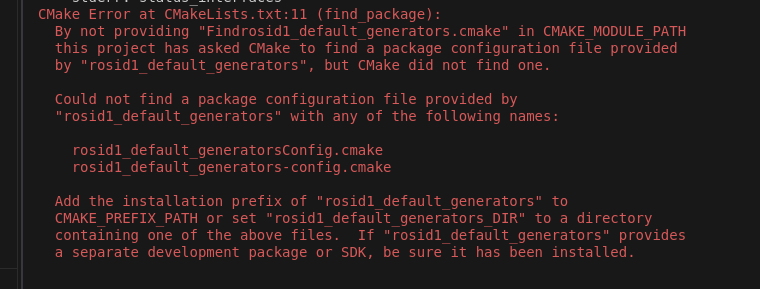
这个问题小伊也能看出来,rosidl 不是 rosid1