#学习ros2 rviz显示小车模型陷入 #rviz
-
ae0e6b39-752a-4925-b9e9-7a205dd1bb30-image.png
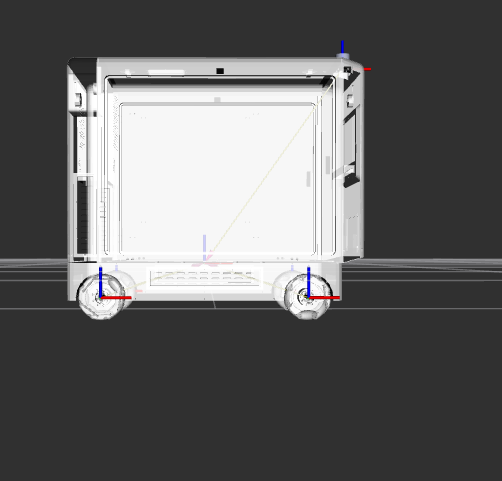
我是在学习urdf模型这块,想着自己建立小车模型(sw导出的urdf),发现导入rviz后,底盘陷入地面,后来更改launch文件的可视化部分,发现
出现了错位,如下: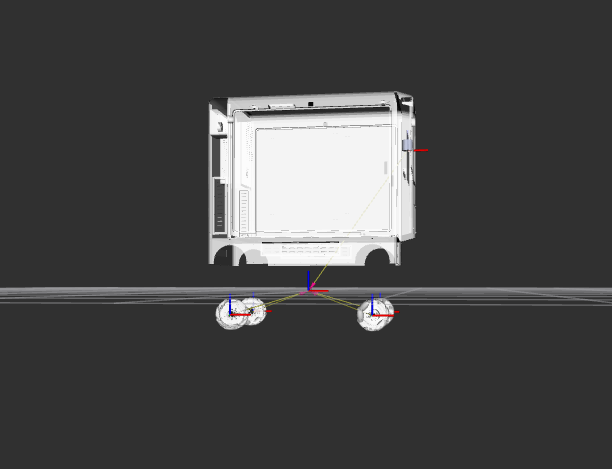 base_link没有跟着变化。
base_link没有跟着变化。
我在想是不是在sw定义坐标系出现的问题,还是tf坐标系的问题 -
在使用ROS 2和RViz进行URDF模型的可视化时,遇到模型陷入地面或坐标系错位的问题通常与URDF文件中定义的坐标系、TF(Transform Frames)的发布以及RViz的配置有关。以下是一些解决步骤和检查点,帮助你诊断和解决这个问题:
1. 检查URDF文件
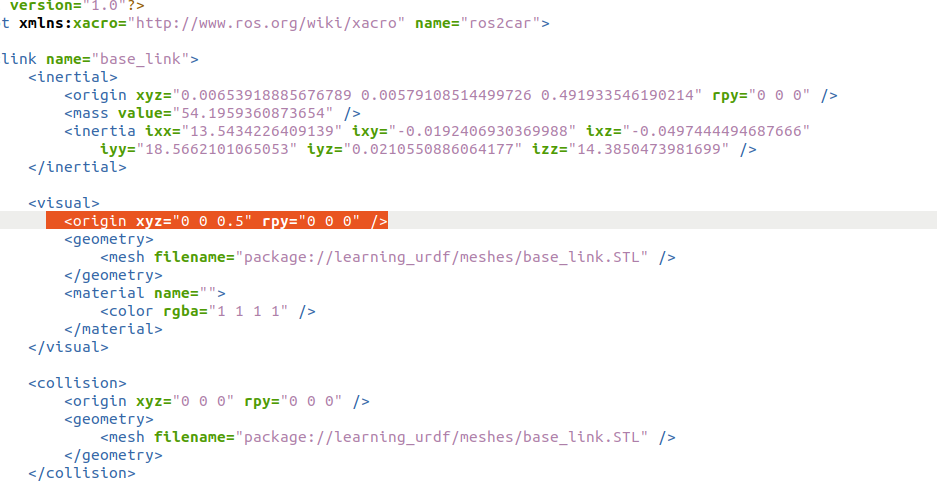
- 确保坐标原点正确:URDF文件中的
base_link(或你定义的底盘链接)应该位于车辆的实际底部中心,且坐标轴(x, y, z)方向正确。 - 链接间的相对位置和姿态:检查所有链接之间的相对位置和姿态是否正确设置。
- 碰撞和视觉属性:确保
collision和visual标签中的尺寸和位置设置正确,这会影响物理模拟和视觉显示。
2. 检查TF变换
- TF树的正确性:使用
ros2 topic echo /tf_static(如果有静态TF)和ros2 topic echo /tf来查看当前的TF树。确保base_link和所有其他链接之间的TF关系正确无误。 - TF发布者:检查是否有节点发布必要的TF变换。通常,如果你使用的是ROS 2的
robot_state_publisher节点,确保它正确加载了你的URDF文件。
3. RViz配置
- 固定帧:在RViz中,确保“Fixed Frame”设置为正确的帧(通常是
base_link或map,取决于你的应用场景)。 - TF显示:在RViz的“TF”显示选项中,确认TF变换的箭头方向正确,没有显示出明显的错位。
- 添加模型:在RViz中,通过“Add” -> “By topic” -> “RobotModel”来添加你的URDF模型,确保选择了正确的主题(通常是
/tf和/robot_description)。
4. 调试
- 可视化TF:在RViz中启用“TF”显示,这可以帮助你直观地看到各个链接之间的相对位置。
- 使用
tf_echo工具:使用ros2 run tf2_ros tf2_echo <source_frame> <target_frame>来检查特定两个帧之间的变换。
5. 示例检查
- 查看示例URDF:尝试加载一个已知可以工作的URDF文件到你的环境中,看看是否也出现同样的问题。这可以帮助你确定问题是否出在URDF文件本身。
6. 软件和依赖
- 确保ROS 2和RViz版本兼容:有时候,软件更新可能引入不兼容的更改。
通过上述步骤,你应该能够诊断并解决URDF模型在RViz中显示错位或陷入地面的问题。如果问题仍然存在,可能需要更详细地检查URDF文件的结构和TF的发布逻辑。
以上为生成回答,仅供参考~
- 确保坐标原点正确:URDF文件中的
{kind=link}