nav2 加载限速区插件不显示问题
-
在加载speed_filter出现不显示在map地图上的问题。
costmap_filter_info_speedlimit.launch.py文件如下:
import os from ament_index_python.packages import get_package_share_directory from launch import LaunchDescription from launch.actions import DeclareLaunchArgument from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node from nav2_common.launch import RewrittenYaml def generate_launch_description(): # 获取成本图过滤器包的路径 costmap_filters_demo_dir = get_package_share_directory('nav2_costmap_filters') # 创建自己的临时YAML文件,包括替换 lifecycle_nodes = ['filter_mask_server', 'costmap_filter_info_server'] namespace = LaunchConfiguration('namespace') use_sim_time = LaunchConfiguration('use_sim_time') autostart = LaunchConfiguration('autostart') # 自动启动 params_file = LaunchConfiguration('params_file') #参数文件路径 mask_yaml_file = LaunchConfiguration('mask') #掩膜YAML文件的路径 # 声明参数 declare_namespace_cmd = DeclareLaunchArgument( 'namespace', default_value='', description='Top-level namespace') declare_use_sim_time_cmd = DeclareLaunchArgument( 'use_sim_time', default_value='true', description='如果为真,则使用模拟(Gazebo)时钟') declare_autostart_cmd = DeclareLaunchArgument( 'autostart', default_value='true', description='如果为真,则自动启动 nav2 堆栈') declare_params_file_cmd = DeclareLaunchArgument( 'params_file', default_value=os.path.join(costmap_filters_demo_dir, 'params', 'speedlimit_params.yaml'), description='ROS2参数文件的完整路径') declare_mask_yaml_file_cmd = DeclareLaunchArgument( 'mask', default_value=os.path.join(costmap_filters_demo_dir, 'maps', 'speed_mask.yaml'), description='掩模YAML文件的完整路径') # 创建重写 YAML 参数 param_substitutions = { 'use_sim_time': use_sim_time, 'yaml_filename': mask_yaml_file} configured_params = RewrittenYaml( source_file=params_file, root_key=namespace, param_rewrites=param_substitutions, convert_types=True) # 转换类型 # 启动生命周期管理器节点 start_lifecycle_manager_cmd = Node( package='nav2_lifecycle_manager', executable='lifecycle_manager', name='lifecycle_manager_costmap_filters', namespace=namespace, output='screen', emulate_tty=True, # https://github.com/ros2/launch/issues/188 parameters=[{'use_sim_time': use_sim_time}, {'autostart': autostart}, {'node_names': lifecycle_nodes}]) # 启动地图服务器节点 start_map_server_cmd = Node( package='nav2_map_server', executable='map_server', name='filter_mask_server', namespace=namespace, output='screen', emulate_tty=True, parameters=[configured_params]) # 启动成本图过滤器信息服务器节点 start_costmap_filter_info_server_cmd = Node( package='nav2_map_server', executable='costmap_filter_info_server', name='costmap_filter_info_server', namespace=namespace, output='screen', emulate_tty=True, parameters=[configured_params]) ld = LaunchDescription() # 添加声明参数的命令 ld.add_action(declare_namespace_cmd) ld.add_action(declare_use_sim_time_cmd) ld.add_action(declare_autostart_cmd) ld.add_action(declare_params_file_cmd) ld.add_action(declare_mask_yaml_file_cmd) # 添加启动节点的命令 ld.add_action(start_lifecycle_manager_cmd) ld.add_action(start_map_server_cmd) ld.add_action(start_costmap_filter_info_server_cmd) return ldspeed_mask.yaml文件如下:
image: speed_mask.pgm mode: scale # 图像中的灰度值会被缩放以映射到成本值上 resolution: 0.05 origin: [-4.61, -3.45, 0] # 原点 negate: 0 # 不反转 occupied_thresh: 1.0 # 占据阈值 free_thresh: 0.0 # 空闲阈值speed_mask.pgm图片如下:

speedlimit_params.yaml文件如下:
costmap_filter_info_server: ros__parameters: use_sim_time: true type: 1 filter_info_topic: "/costmap_filter_info" mask_topic: "/speed_filter_mask" base: 100.0 multiplier: -1.0 filter_mask_server: ros__parameters: use_sim_time: true frame_id: "map" topic_name: "/speed_filter_mask" yaml_filename: "speed_mask.yaml"navigation2_speedlimit.launch.py文件如下:
import os from ament_index_python.packages import get_package_share_directory from launch import LaunchDescription from launch.actions import IncludeLaunchDescription from launch.launch_description_sources import PythonLaunchDescriptionSource from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node def generate_launch_description(): # 定位到包的地址 fishbot_navigation2_dir = get_package_share_directory('fishbot_navigation2') nav2_bringup_dir = get_package_share_directory('nav2_bringup') # 声明参数,获取配置文件路径 # use_sim_time 这里要设置成true,因为gazebo是仿真环境,其时间是通过/clock话题获取,而不是系统时间 use_sim_time = LaunchConfiguration('use_sim_time', default='true') map_yaml_path = LaunchConfiguration('map',default=os.path.join(fishbot_navigation2_dir,'maps','fishbot_map.yaml')) nav2_param_path = LaunchConfiguration('params_file',default=os.path.join(fishbot_navigation2_dir,'param','speedlimit_nav2_params.yaml')) rviz_config_dir = os.path.join(nav2_bringup_dir,'rviz','nav2_default_view.rviz') # 声明启动launch文件,传入:地图路径、是否使用仿真时间以及nav2参数文件 nav2_bringup_launch = IncludeLaunchDescription( PythonLaunchDescriptionSource([nav2_bringup_dir,'/launch','/bringup_launch.py']), launch_arguments={ 'map': map_yaml_path, 'use_sim_time': use_sim_time, 'params_file': nav2_param_path}.items(), ) rviz_node = Node( package='rviz2', executable='rviz2', name='rviz2', arguments=['-d', rviz_config_dir], parameters=[{'use_sim_time': use_sim_time}], output='screen') return LaunchDescription([nav2_bringup_launch ,rviz_node ])speedlimit_nav2_params.yaml文件如下:
amcl: ros__parameters: use_sim_time: True alpha1: 0.2 alpha2: 0.2 alpha3: 0.2 alpha4: 0.2 alpha5: 0.2 base_frame_id: "base_link" beam_skip_distance: 0.5 beam_skip_error_threshold: 0.9 beam_skip_threshold: 0.3 do_beamskip: false global_frame_id: "map" lambda_short: 0.1 laser_likelihood_max_dist: 2.0 laser_max_range: 100.0 laser_min_range: -1.0 laser_model_type: "likelihood_field" max_beams: 60 max_particles: 2000 min_particles: 500 odom_frame_id: "odom" pf_err: 0.05 pf_z: 0.99 recovery_alpha_fast: 0.0 recovery_alpha_slow: 0.0 resample_interval: 1 robot_model_type: "nav2_amcl::DifferentialMotionModel" save_pose_rate: 0.5 sigma_hit: 0.2 tf_broadcast: true transform_tolerance: 10.0 update_min_a: 0.2 update_min_d: 0.25 z_hit: 0.5 z_max: 0.05 z_rand: 0.5 z_short: 0.05 scan_topic: scan amcl_map_client: ros__parameters: use_sim_time: True amcl_rclcpp_node: ros__parameters: use_sim_time: True bt_navigator: ros__parameters: use_sim_time: True global_frame: map robot_base_frame: base_link odom_topic: /odom bt_loop_duration: 10 default_server_timeout: 20 # 'default_nav_through_poses_bt_xml' and 'default_nav_to_pose_bt_xml' are use defaults: # nav2_bt_navigator/navigate_to_pose_w_replanning_and_recovery.xml # nav2_bt_navigator/navigate_through_poses_w_replanning_and_recovery.xml # They can be set here or via a RewrittenYaml remap from a parent launch file to Nav2. plugin_lib_names: - nav2_compute_path_to_pose_action_bt_node - nav2_compute_path_through_poses_action_bt_node - nav2_smooth_path_action_bt_node - nav2_follow_path_action_bt_node - nav2_spin_action_bt_node - nav2_wait_action_bt_node - nav2_back_up_action_bt_node - nav2_drive_on_heading_bt_node - nav2_clear_costmap_service_bt_node - nav2_is_stuck_condition_bt_node - nav2_goal_reached_condition_bt_node - nav2_goal_updated_condition_bt_node - nav2_globally_updated_goal_condition_bt_node - nav2_is_path_valid_condition_bt_node - nav2_initial_pose_received_condition_bt_node - nav2_reinitialize_global_localization_service_bt_node - nav2_rate_controller_bt_node - nav2_distance_controller_bt_node - nav2_speed_controller_bt_node - nav2_truncate_path_action_bt_node - nav2_truncate_path_local_action_bt_node - nav2_goal_updater_node_bt_node - nav2_recovery_node_bt_node - nav2_pipeline_sequence_bt_node - nav2_round_robin_node_bt_node - nav2_transform_available_condition_bt_node - nav2_time_expired_condition_bt_node - nav2_path_expiring_timer_condition - nav2_distance_traveled_condition_bt_node - nav2_single_trigger_bt_node - nav2_is_battery_low_condition_bt_node - nav2_navigate_through_poses_action_bt_node - nav2_navigate_to_pose_action_bt_node - nav2_remove_passed_goals_action_bt_node - nav2_planner_selector_bt_node - nav2_controller_selector_bt_node - nav2_goal_checker_selector_bt_node - nav2_controller_cancel_bt_node - nav2_path_longer_on_approach_bt_node - nav2_wait_cancel_bt_node - nav2_spin_cancel_bt_node - nav2_back_up_cancel_bt_node - nav2_drive_on_heading_cancel_bt_node bt_navigator_rclcpp_node: ros__parameters: use_sim_time: True controller_server: ros__parameters: use_sim_time: True controller_frequency: 20.0 min_x_velocity_threshold: 0.001 min_y_velocity_threshold: 0.5 min_theta_velocity_threshold: 0.001 failure_tolerance: 0.3 progress_checker_plugin: "progress_checker" goal_checker_plugins: ["general_goal_checker"] # "precise_goal_checker" controller_plugins: ["FollowPath"] speed_limit_topic: "/speed_limit" # Progress checker parameters progress_checker: plugin: "nav2_controller::SimpleProgressChecker" required_movement_radius: 0.5 movement_time_allowance: 10.0 # Goal checker parameters #precise_goal_checker: # plugin: "nav2_controller::SimpleGoalChecker" # xy_goal_tolerance: 0.25 # yaw_goal_tolerance: 0.25 # stateful: True general_goal_checker: stateful: True plugin: "nav2_controller::SimpleGoalChecker" xy_goal_tolerance: 0.25 yaw_goal_tolerance: 0.25 # DWB parameters FollowPath: plugin: "dwb_core::DWBLocalPlanner" debug_trajectory_details: True min_vel_x: 0.0 min_vel_y: 0.0 max_vel_x: 0.26 max_vel_y: 0.0 max_vel_theta: 1.0 min_speed_xy: 0.0 max_speed_xy: 0.26 min_speed_theta: 0.0 # Add high threshold velocity for turtlebot 3 issue. # https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75 acc_lim_x: 2.5 acc_lim_y: 0.0 acc_lim_theta: 3.2 decel_lim_x: -2.5 decel_lim_y: 0.0 decel_lim_theta: -3.2 vx_samples: 20 vy_samples: 5 vtheta_samples: 20 sim_time: 1.7 linear_granularity: 0.05 angular_granularity: 0.025 transform_tolerance: 0.2 xy_goal_tolerance: 0.25 trans_stopped_velocity: 0.25 short_circuit_trajectory_evaluation: True stateful: True critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"] BaseObstacle.scale: 0.02 PathAlign.scale: 32.0 PathAlign.forward_point_distance: 0.1 GoalAlign.scale: 24.0 GoalAlign.forward_point_distance: 0.1 PathDist.scale: 32.0 GoalDist.scale: 24.0 RotateToGoal.scale: 32.0 RotateToGoal.slowing_factor: 5.0 RotateToGoal.lookahead_time: -1.0 controller_server_rclcpp_node: ros__parameters: use_sim_time: True local_costmap: local_costmap: ros__parameters: update_frequency: 5.0 publish_frequency: 2.0 global_frame: odom robot_base_frame: base_link use_sim_time: True rolling_window: true width: 3 height: 3 resolution: 0.05 robot_radius: 0.08 plugins: ["voxel_layer", "inflation_layer"] inflation_layer: plugin: "nav2_costmap_2d::InflationLayer" cost_scaling_factor: 3.0 inflation_radius: 0.16 voxel_layer: plugin: "nav2_costmap_2d::VoxelLayer" enabled: True publish_voxel_map: True origin_z: 0.0 z_resolution: 0.05 z_voxels: 16 max_obstacle_height: 2.0 mark_threshold: 0 observation_sources: scan scan: topic: /scan max_obstacle_height: 2.0 clearing: True marking: True data_type: "LaserScan" raytrace_max_range: 3.0 raytrace_min_range: 0.0 obstacle_max_range: 2.5 obstacle_min_range: 0.0 static_layer: map_subscribe_transient_local: True always_send_full_costmap: True local_costmap_client: ros__parameters: use_sim_time: True local_costmap_rclcpp_node: ros__parameters: use_sim_time: True global_costmap: global_costmap: ros__parameters: update_frequency: 1.0 publish_frequency: 1.0 global_frame: map robot_base_frame: base_link use_sim_time: True robot_radius: 0.08 resolution: 0.05 track_unknown_space: true plugins: ["static_layer", "obstacle_layer", "inflation_layer"] filters: ["speed_filter"] obstacle_layer: plugin: "nav2_costmap_2d::ObstacleLayer" enabled: True observation_sources: scan scan: topic: /scan max_obstacle_height: 2.0 clearing: True marking: True data_type: "LaserScan" raytrace_max_range: 3.0 raytrace_min_range: 0.0 obstacle_max_range: 2.5 obstacle_min_range: 0.0 static_layer: plugin: "nav2_costmap_2d::StaticLayer" map_subscribe_transient_local: True inflation_layer: plugin: "nav2_costmap_2d::InflationLayer" cost_scaling_factor: 3.0 inflation_radius: 0.16 speed_filter: plugin: "nav2_costmap_2d::SpeedFilter" enabled: True filter_info_topic: "/costmap_filter_info" speed_limit_topic: "/speed_limit" always_send_full_costmap: True global_costmap_client: ros__parameters: use_sim_time: True global_costmap_rclcpp_node: ros__parameters: use_sim_time: True map_server: ros__parameters: use_sim_time: True yaml_filename: "turtlebot3_world.yaml" map_saver: ros__parameters: use_sim_time: True save_map_timeout: 5.0 free_thresh_default: 0.25 occupied_thresh_default: 0.65 map_subscribe_transient_local: True planner_server: ros__parameters: expected_planner_frequency: 20.0 use_sim_time: True planner_plugins: ["GridBased"] GridBased: plugin: "nav2_navfn_planner/NavfnPlanner" tolerance: 0.5 use_astar: false allow_unknown: true planner_server_rclcpp_node: ros__parameters: use_sim_time: True smoother_server: ros__parameters: use_sim_time: True smoother_plugins: ["simple_smoother"] simple_smoother: plugin: "nav2_smoother::SimpleSmoother" tolerance: 1.0e-10 max_its: 1000 do_refinement: True behavior_server: ros__parameters: costmap_topic: local_costmap/costmap_raw footprint_topic: local_costmap/published_footprint cycle_frequency: 10.0 behavior_plugins: ["spin", "backup", "drive_on_heading", "wait"] spin: plugin: "nav2_behaviors/Spin" backup: plugin: "nav2_behaviors/BackUp" drive_on_heading: plugin: "nav2_behaviors/DriveOnHeading" wait: plugin: "nav2_behaviors/Wait" global_frame: odom robot_base_frame: base_link transform_tolerance: 0.1 use_sim_time: true simulate_ahead_time: 2.0 max_rotational_vel: 1.0 min_rotational_vel: 0.4 rotational_acc_lim: 3.2 robot_state_publisher: ros__parameters: use_sim_time: True waypoint_follower: ros__parameters: loop_rate: 20 stop_on_failure: false waypoint_task_executor_plugin: "wait_at_waypoint" wait_at_waypoint: plugin: "nav2_waypoint_follower::WaitAtWaypoint" enabled: True waypoint_pause_duration: 200fishbot_map.yaml文件如下:
image: fishbot_map.pgm mode: trinary resolution: 0.05 origin: [-4.61, -3.45, 0] negate: 0 occupied_thresh: 0.65 free_thresh: 0.25fishbot_map.pgm文件如下:
启动终端:
ros2 launch fishbot_description gazebo.launch.py ros2 launch fishbot_bringup fishbot_bringup.launch.py ros2 launch nav2_costmap_filters costmap_filter_info_speedlimit.launch.py ros2 launch fishbot_navigation2 navigation2_speedlimit.launch.py结果显示:
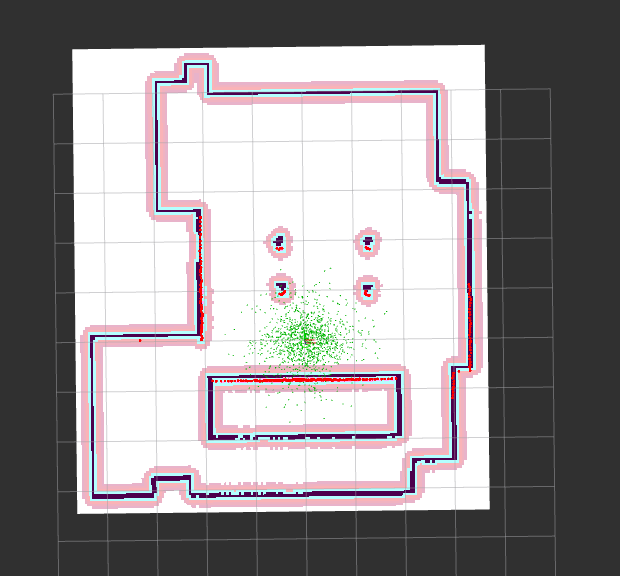
没有在右上角显示限速区,这个应该怎么解决???