ROS2humble版本,编写python代码导入moveit_commander库后运行出错
-
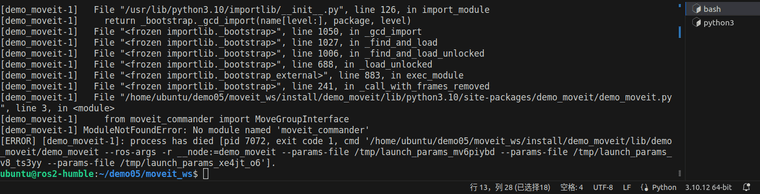
使用moveit_commander包中的MoveGroupInterface时,编译没有报错,运行代码时报错!
尝试编译moveit2中的moveit_commander功能包结果报错,又尝试使用moveit_py功能包,还是报错 -
在使用ROS 2 Humble版本和MoveIt 2时,遇到
moveit_commander库相关的问题可能有几个原因。首先,需要明确的是,moveit_commander是ROS 1(特别是MoveIt 1)中的一个Python库,用于简化机器人运动规划和控制的接口。在ROS 2和MoveIt 2中,这个库被重新设计,但可能不完全相同,或者其API和用法有所变化。解决步骤
-
确认使用正确的库和接口:
- 在ROS 2和MoveIt 2中,你应该使用
moveit_ros2_planning_interface_py(或类似的包)而不是moveit_commander。moveit_commander是为ROS 1设计的。 - 检查你的ROS 2工作空间中是否正确安装了MoveIt 2相关的包。
- 在ROS 2和MoveIt 2中,你应该使用
-
安装和配置MoveIt 2:
- 确保你已经按照MoveIt 2的官方文档安装了所有必要的依赖项和包。
- 如果你使用的是官方提供的Docker镜像或安装脚本,请确保按照指导操作。
-
查看示例代码:
- 查找MoveIt 2的官方示例代码,这些代码通常位于MoveIt 2的GitHub仓库中,或者在ROS 2的文档里。
- 尝试运行这些示例代码,看看是否能成功执行。
-
检查错误消息:
- 当你运行你的代码时,ROS 2会输出错误消息。这些消息通常会指出问题的具体原因,比如缺少的依赖项、API调用错误等。
- 根据错误消息调整你的代码或安装配置。
-
查阅文档和社区资源:
- 访问ROS 2和MoveIt 2的官方文档,了解如何正确使用这些工具。
- 搜索相关的论坛帖子、GitHub问题或Stack Overflow答案,看看是否有人遇到并解决了类似的问题。
-
编写和运行简单的测试代码:
- 编写一个简单的Python脚本,只尝试初始化
MoveGroupInterface,看看是否还会报错。 - 例如:
from moveit_ros2_planning_interface_py.planning_interface import MoveGroupInterface move_group = MoveGroupInterface("manipulator", "robot_description") - 注意替换
"manipulator"和"robot_description"为你的实际参数。
- 编写一个简单的Python脚本,只尝试初始化
-
环境问题:
- 确保你的ROS 2环境变量(如
ROS_DOMAIN_ID、PYTHONPATH等)设置正确。 - 如果你在使用虚拟环境,确保它已激活,并且所有必要的包都已安装在该环境中。
- 确保你的ROS 2环境变量(如
通过上述步骤,你应该能够诊断并解决在使用ROS 2和MoveIt 2时遇到的与
moveit_commander相关的问题。如果问题仍然存在,可能需要更详细的错误信息来进一步分析。
以上为生成回答,仅供参考~
-
-
B becase9426 在 中 引用了 这个主题
-
@1126799170 解决了吗老哥,我也遇到这个问题
-
@wwwzy 请问您解决了吗?我也遇到了这个问题。
-
@lijiayi3222 不建议用moveit2
的python接口,我这边可以用python接口顺利移动机器人后还是或有报错,官方表示还在debugging,建议用moveit2 的action接口,cpp和py下都可以用,还支持多点规划