cartographer建图出错,好像是信息无法处理
-
大家好,我现在在用ros2 ubuntu22.04 humble cartographer实机建图的时候出现了一些问题,具体情况如下所示
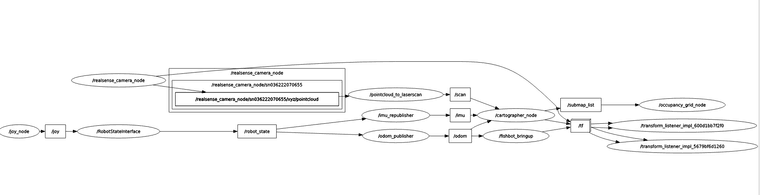

现在没有地图信息输出,/scan和/odom都是有输出的,这两个的输出我通过机器人厂家给出的/robot_state以及点云图信息(realsense d435i)转换的,请问有什么解决办法吗 -
针对您在使用ROS2 Ubuntu 22.04 Humble Cartographer进行实机建图时遇到的问题,即没有地图信息输出,但/scan和/odom有输出的情况,这里提供一些可能的解决办法和检查步骤:
-
检查依赖项和版本匹配:
- 确保所有必要的依赖项都已安装,并且版本与Cartographer ROS2要求的版本匹配。可以通过查看Cartographer的官方文档或README文件来获取依赖项和版本信息。
- 使用
sudo apt-get update和sudo apt-get install命令来安装或更新依赖项。
-
检查配置文件:
- 仔细检查Cartographer的配置文件(通常是.lua文件),确保所有参数都正确设置。特别是与传感器输入(如激光扫描仪)和帧转换相关的参数。
- 确保
map_frame、tracking_frame、published_frame和odom_frame等参数与实际使用的传感器和平台匹配。 - 检查
lookup_transform_timeout_sec参数,确保它设置得足够长,以便Cartographer有足够的时间来获取必要的变换信息。
-
检查时间同步:
- 确保所有传感器和计算机节点的时间都已同步。时间不同步可能导致变换查找失败或数据不一致。
- 可以使用NTP(网络时间协议)来同步时间。
-
检查ROS2节点和话题:
- 使用
ros2 node list和ros2 topic list命令来检查所有正在运行的节点和话题。 - 确保/scan和/odom话题正在发布数据,并且数据格式与Cartographer配置文件中的期望格式匹配。
- 可以使用
ros2 topic echo命令来查看话题上的数据内容。
- 使用
-
检查日志和调试:
- 查看ROS2的日志文件,找出可能的错误信息或警告。可以使用
ros2 log list和ros2 log show命令来查看日志。 - 根据日志中的错误信息,调试相关节点。可以使用
ros2 run命令单独运行节点,并结合ros2 bag工具进行数据回放调试。
- 查看ROS2的日志文件,找出可能的错误信息或警告。可以使用
-
尝试简化配置:
- 如果可能的话,尝试使用Cartographer的默认配置文件或简化后的配置文件进行测试,以排除配置错误的可能性。
-
更新Cartographer和ROS2:
- 确保您正在使用Cartographer和ROS2的最新稳定版本。有时,软件更新可能包含重要的bug修复和改进。
-
检查传感器数据:
- 确保从/scan话题接收到的激光扫描数据是完整和准确的。有时,传感器故障或配置错误可能导致数据不完整或格式不正确。
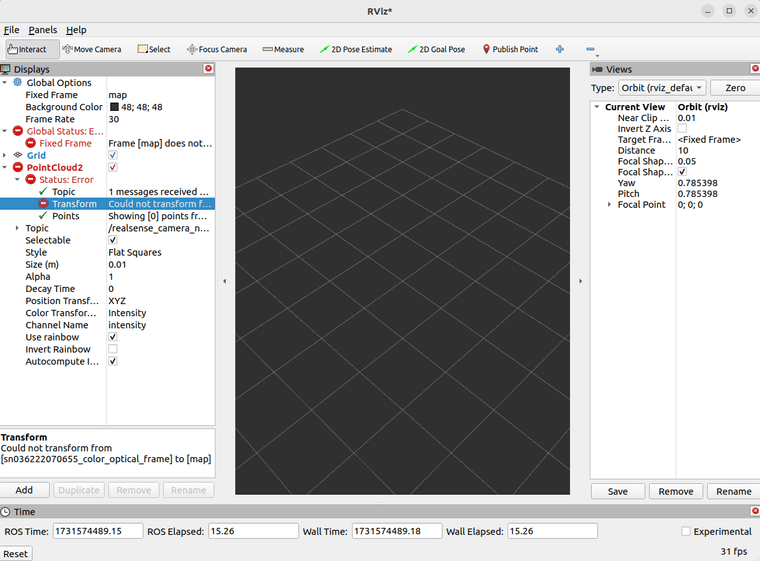
- 可以使用可视化工具(如RViz)来查看激光扫描数据。
如果以上步骤都无法解决问题,您可能需要更深入地调查Cartographer的内部工作原理,或者寻求来自Cartographer社区或机器人制造商的帮助。
以上为生成回答,仅供参考~
-
-
@cheesecaek 检查各个数据源数据和时间戳,然后检查tf
-
@小鱼
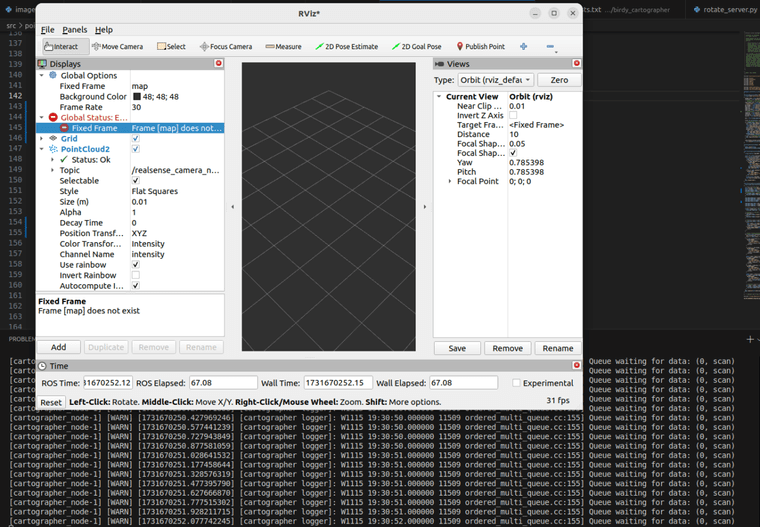
鱼哥,我把时间戳更新了,现在报错是这样的
然后这是我的tf树,我还应该加什么吗
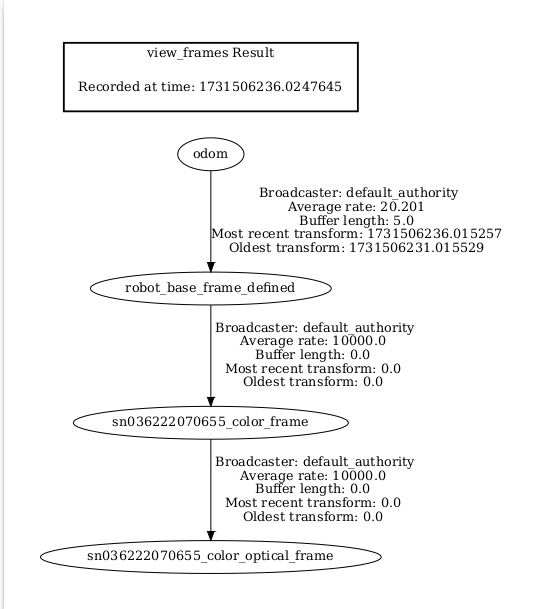
我不太清楚该怎么添加urdf,并且我的urdf里没有imu_link之类的,只有机器人端身体位姿,但我知道imu与odom和baselink是重合的,scan和头部是重合的,我该怎么修改并添加呢