章节6.4.2无法加载出来机器人模型,我是foxy,尝试用作者git上面的代码运行,也是没有看到机器人模型
-
背景(可选):
foxy
gazebo11
在urdf目录下没有生存sdf文件问题描述:
6.4.2无法加载出来机器人模型
问题1:
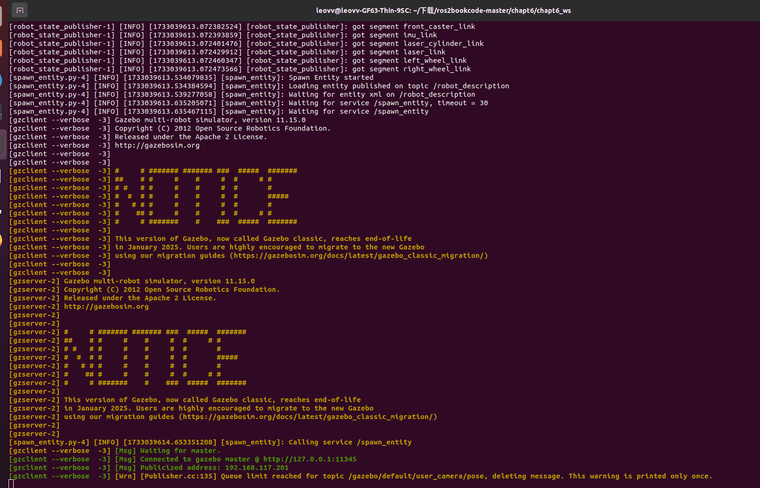
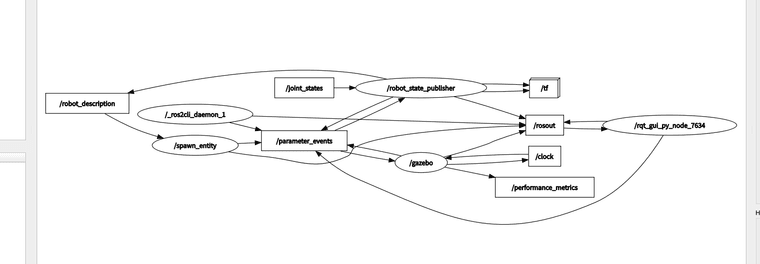
1.生成sdf文件这一步骤应该是出错了,但是没有报错,我想知道调试思路,我是作为新手的情况下,对比文件差异,得出这个结论(sdf没有生成导致模型没有出现),想问一下就是在客户端一直在等待的情况下,我知道subscribe是/gazebo的情况下怎么调试?没有源码,最起码应该是由log文件的。我在.gazebo文件夹里面找到了gzserve跟gzclient的log文件,没有报错。
问题2:
是否是因为sdf没有生成导致模型没有出现,正常是怎么样子的,我是指sdf文件应该根据什么参数在什么地方生成。具体细节和上下文:
手动 生成了fishbot.urdf.xacro>fishbot.urdf
尝试过的解决方法:
1.尝试将生成的urdf文件转为sdf文件格式,直接打开gazebo是可以的,说明urdf文件是没有问题的。
2. 直接修改参数为本地的也不行, spawn_entity_node = launch_ros.actions.Node(
package='gazebo_ros',
executable='spawn_entity.py',
arguments=[
'-entity','fishbot',
'-database','fishbot'
]
)
 ,但是在执行gazebo_sim.launch.py之后直接insert 在GAZEBO_MODEL_PATH=/home/leovv/.gazebo/models这个目录下的fishbot是正常的
,但是在执行gazebo_sim.launch.py之后直接insert 在GAZEBO_MODEL_PATH=/home/leovv/.gazebo/models这个目录下的fishbot是正常的
3.查看了gazebo日志 -
不用看了,版本问题,gazebo升级到了11.15,莫名其妙的错误,降到11.10就可以了,心累,搞了3天
-
不用看了,版本问题,gazebo升级到了11.15,莫名其妙的错误,降到11.10就可以了,心累,搞了3天