第九章 9.4.1 micro_ros_agent无法与微控制器通信,节点也没有出现
-
@onedream 虚拟机还是实体机,检查下linux的ip地址先。 另外你的agent命令后加个 -v6 看看
-
@小鱼 感谢小鱼老师,我使用的是虚拟机,按照你的方法更好虚拟机IP地址后就成功了。我也测试了不加v6都可以。途中出现debug信息我推测是网络不稳定造成的。最后希望小鱼老师有空上传下fishbot_motion_control的源码,对于我这个小白每次都要想好久才知道代码增加的位置应该放哪里才是正确的。麻烦了。
-
@onedream 你好这个问题怎么解决的,我也遇到了?大神能详细说说吗?
-
@945717873 在 第九章 9.4.1 micro_ros_agent无法与微控制器通信,节点也没有出现 中说:
@onedream 你好这个问题怎么解决的,我也遇到了?大神能详细说说吗?
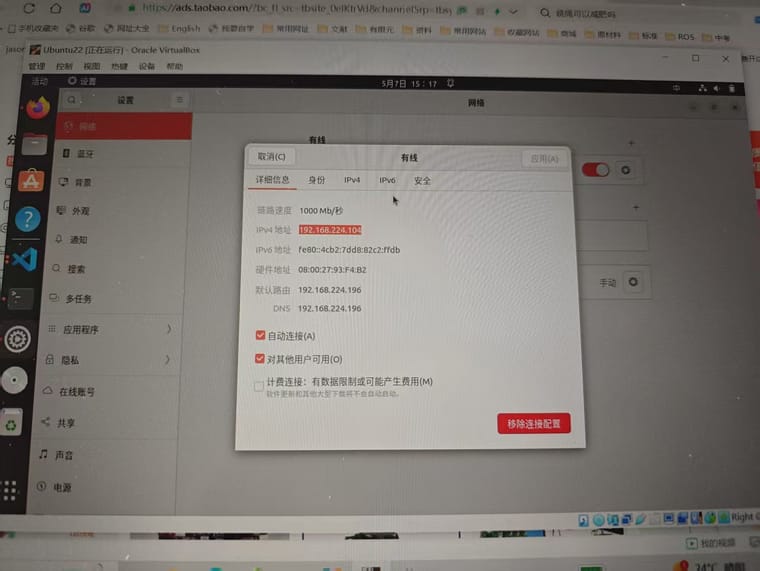
虚拟机网络选择的是桥接网卡模式,但是在复制IP地址是Ubuntu右上角,有线连接,可以看到IP4地址,但是和鱼哥视频教程了的不太一样,视频教程里是直接就能看到WiFi连接的详细信息。
-
@945717873 在 第九章 9.4.1 micro_ros_agent无法与微控制器通信,节点也没有出现 中说:
@945717873 在 第九章 9.4.1 micro_ros_agent无法与微控制器通信,节点也没有出现 中说:
@onedream 你好这个问题怎么解决的,我也遇到了?大神能详细说说吗?
虚拟机网络选择的是桥接网卡模式,但是在复制IP地址是Ubuntu右上角,有线连接,可以看到IP4地址,但是和鱼哥视频教程了的不太一样,视频教程里是直接就能看到WiFi连接的详细信息。
-
@945717873 在 第九章 9.4.1 micro_ros_agent无法与微控制器通信,节点也没有出现 中说:
@945717873 在 第九章 9.4.1 micro_ros_agent无法与微控制器通信,节点也没有出现 中说:
@945717873 在 第九章 9.4.1 micro_ros_agent无法与微控制器通信,节点也没有出现 中说:
@onedream 你好这个问题怎么解决的,我也遇到了?大神能详细说说吗?
虚拟机网络选择的是桥接网卡模式,但是在复制IP地址是Ubuntu右上角,有线连接,可以看到IP4地址,但是和鱼哥视频教程了的不太一样,视频教程里是直接就能看到WiFi连接的详细信息。
应该是虚拟机没有WiFi,只有有线模式,所以连接不上。怎么在虚拟机上解决有WiFi模式,是否可行? -
@945717873 对的,你的思路是对的就是用这个IP地址,还好刚刚我改了IP地址知道,不然还没办法回复你。哈哈哈,感觉学起来完全没有忘记快!
-
@onedream电脑A安装了Ubuntu虚拟机,电脑A和虚拟机都连接到路由器中,Ubuntu虚拟机IP地址:192.168.2.12,单片机esp32也是连接到了该路由器上,单片机esp32的IP地址:192.168.2.57。并且电脑A,ubuntu虚拟机,单片机esp32都在同一子网下,通过Ubuntu虚拟机ping 192.168.2.57和ping 192.168.2.12都能ping的通,通过电脑A的window系统ping 192.168.2.57和ping 192.168.2.12也能ping的通,但是在esp32中写程序ping 192.168.2.12是不通的,而且在电脑A中的Ubuntu虚拟机中,开启了Microros agent,代码:ros2 run micro_ros_agent micro_ros_agent udp4 --port 8888,这是什么原因?用了这个地址也不行啊?我也开了虚拟机连桥模式。还有那些细节吗?
-
@945717873 理论上固件中的IP地址就是你截图的地址,而且这个地址会用在主控板和雷达转接板上。关于你提供的esp32链接WiFi后的IP地址不会用上。既然你主控板已经连接上WiFi,只是他们之间不通信,我的建议是检查代码是否和小鱼老师的一致有没有自己的私货或者错误的,再结合参考小鱼老师的课件,一起排查一下看看。我当时只是IP地址用错了,改了IP地址就直接通信上了。
-
@onedream 谢谢,大神,已经解决,方法没有问题,问题出在路由器,用家里的路由器是可以的,公司的不行。